本文共 10706 字,大约阅读时间需要 35 分钟。
面向5G车联网仿真平台的搭建
本博客是基于SRTP(面向5G车联网仿真平台设计与开发)而搭建的“面向5G车联网的网络仿真平台”,以供大家学习使用。
目录
前言概述
准备工作
下载ns-3
构建ns-3
测试ns-3
NS-3仿真可视化
前言概述
- 项目简介 项目立名为:”5G车联网仿真平台“,团队所有成员通过学习相关的NS-3相关技术知识、研究学习5G车联网和V2X等相关参考文献,在研究3GPP Release 12 ProSe 系统架构以及信令流程基础上,综述基于LTE-V2X的车联网协议研究和标准化进展,通过现有理论与技术分析,提出设计方案,在大唐研发的基于LTE网络的V2X的基础上,继续研发出进一步严禁的基于5G网络的V2X,可望支持更低时延(< 10ms)、更高可靠性(99.999%)、更大宽带(支持视频共享)的”传感共享“。
- 项目特色与创新
- 特色 以”车对外界“信息交换为主要功能的V2X技术正在成为车联网的新亮点,是继信息娱乐之后,推动汽车网络组建的新应用。基于将来5G网络的V2X则可望支持更低时延(<10ms)、更高可靠性(99.999%)、更大带宽(支持视频共享)的“传感共享”,并扩展至通过采取“点对点”双向应答式通信方式,实现自动驾驶所需的实时“多车协同”,同时实现大带宽低时延的“车-云”互联,实时下载上传3D地图,并支持全体自动驾驶车的实时经验共享和“群学习”,大幅提高人工智能的学习速度,支撑自动驾驶技术实现商用和普及。
- 创新 基于5G网络的V2X将更具有智能化,在全新的5G时代,它将完全实现“5W”的理念:任何时间(whenever)、任何地点(wherever)、任何人(whoever)、任何事物(whatever)以及任何接收者(whomever),这不仅在技术上是一种革新,更是一种理念上的变革,实现了不仅是人与人,车与车之间的完全通信,更是将车与车,车与人也紧密的联系到了一起,这在车联网行业将是一项重大的突破!
- NS-3概述
- ns-3 被构建为能够协同工作的软件库系统。可以编写链接这些库的(或导入这些库的)用户程序。用户程序既可用 C++ 也可 Python 编写。ns-3 以源码形式发布,这意味着目标系统需要有软件开发环境能够首先构建所需的库,然后构建用户程序。
准备工作
工具/环境
书籍(后续安装ns-3需要用):
- 纸质版:《ns-3网络模拟器基础与应用》马春光,姚建盛
- 电子阅读版:
官方文档阅读:
环境:
- 电脑、linux操作系统
- 依赖包安装(重点,可能会踩很多坑,这个要根据你的电脑环境而定):(<-在这里我将其总结为一个脚本->)
1.sudo apt-get install gcc g++ python python-dev //C++和python安装,必装 2.sudo apt-get install mercurial //NS3代码维护使用的源码版本控制管理系统 3.sudo apt-get install bzr //运行python绑定ns-3-dev需要bazaar这个组件 4.sudo apt-get install libgtk2.0-0 libgtk2.0-dev //基于GTK的配置系统 5.sudo apt-get install gdb valgrind //调试工具 6.sudo apt-get install doxygen graphviz imagemagick //文档生成器 7.sudo apt-get install texlive texlive-latex-extra //文档生成器,从源代码中生成说明文档 8.sudo apt-get install texinfo dia texlive-extra-utils texi2html //ns-3手册和tutorial编写查看工具9.sudo apt-get install flex bison //仿真必需的词法分析器和语法分析生成器,必装 10.sudo apt-get install libgoocanvas-dev //部分移动场景仿真的可视化测试需要 这个组件 11.sudo apt-get install tcpdump //读取pcap的packet traces,即包嗅探器 12.sudo apt-get install sqlite sqlite3 libsqlite3-dev //支持统计特性的数据库软件 13.sudo apt-get install libxml2 //xml的配置存储软件 14.sudo apt-get install python-pygraphviz python-kiwi python-pygoocanvas //Gustavo's ns-3-pyviz的可视化软件 15.sudo apt-get install qt4-qmake 16.sudo apt-get install qt4-dev-toolsps:安装过程中肯定会出现各种各样的错误,不过一般网上都有答案,这里我也就不需要一一列出来来,这个要根据安装实际情况而定。
下载ns-3
- ns-3使用版本 我们使用的是 ,现在版本已经更新到ns-allinone-3.28,建议还是使用ns-allinone-3.26
- 第一种方法:直接下载tar压缩包,网址下载:
- 第二种方法:命令行进行下载
mkdir tarballs //创建名字为tarballs的文件夹cd tarballs //进入tarballs文件夹wget http://www.nsnam.org/release/ns-allinone-3.26.tar.bz2 //连网下载NS-3.26版本tar xjf ns-allinone-3.26.tar.bz2 //使用tar解压
进入到目录ns-allinone-3.26,能看到如下文件和目录:
$ lsbake constants.py ns-3.26 README build.py netanim-3.107 pybindgen-0.17.0.post57+nga6376f2 util.py
ns-3下载工作到这里就基本完成了,接下来可以开始构建ns-3了。
构建ns-3
- 使用build.py编译 进入ns-allinone-3.26文件夹,并键入以下命令进行编译:
$ ./build.py --enable-examples --enable-tests
编译完成后,您会看到显示的是构建脚本构建你下载的各种内容的信息。最终显示如下:
Waf: Leaving directory `/path/to/workspace/ns-allinone-3.26/ns-3.26/build''build' finished successfully (6m25.032s)Modules built:antenna aodv applicationsbridge buildings config-storecore csma csma-layoutdsdv dsr energyfd-net-device flow-monitor internetinternet-apps lr-wpan ltemesh mobility mpinetanim (no Python) network nix-vector-routingolsr openflow (no Python) point-to-pointpoint-to-point-layout propagation sixlowpanspectrum stats tap-bridgetest (no Python) topology-read traffic-controluan virtual-net-device visualizerwave wifi wimaxModules not built (see ns-3 tutorial for explanation):brite click
尚未被构建的部分:
Modules not built (see ns-3 tutorial for explanation):brite click
这只是意味着某些ns-3模块依赖的外部库可能尚未安装,或者配置文件专门指定的不构建他们。这并不意味着模拟器没有成功构建,也不意味着其会对正在构建的(被列出的)模块给出错误的的结果。
- 使用waf编译 一旦工程已经编译过,就不能再使用build.py脚本进行编译 进入ns-allinone-3.26/ns-3.26目录,键入以下命令:
$ ./waf clean //清除以前的版本$ ./waf -d debug --enable-examples --enable-tests configure //重新配置ns-3项目,并构建系统检查各种依赖关系
正式编译:
$ ./waf
输出如下结果:
[2593/2631] Linking build/bindings/python/ns/traffic_control.so[2594/2631] Linking build/bindings/python/ns/network.so[2595/2631] Linking build/bindings/python/ns/wifi.so[2596/2631] Linking build/bindings/python/ns/nix_vector_routing.so[2597/2631] Linking build/bindings/python/ns/lte.so[2598/2631] Linking build/bindings/python/ns/buildings.so[2599/2631] Linking build/bindings/python/ns/aodv.so[2600/2631] Linking build/bindings/python/ns/point_to_point.so[2601/2631] Linking build/bindings/python/ns/fd_net_device.so[2602/2631] Linking build/bindings/python/ns/mpi.so[2603/2631] Linking build/bindings/python/ns/wave.so[2604/2631] Linking build/bindings/python/ns/csma.so[2605/2631] Linking build/bindings/python/ns/dsdv.so[2606/2631] Linking build/bindings/python/ns/topology_read.so[2607/2631] Linking build/bindings/python/ns/internet_apps.so[2608/2631] Linking build/utils/ns3.26-print-introspected-doxygen-debug[2609/2631] Linking build/scratch/subdir/subdir[2610/2631] Linking build/bindings/python/ns/energy.so[2611/2631] Linking build/bindings/python/ns/antenna.so[2612/2631] Linking build/bindings/python/ns/internet.so[2613/2631] Linking build/bindings/python/ns/tap_bridge.so[2614/2631] Linking build/bindings/python/ns/wimax.so[2615/2631] Linking build/bindings/python/ns/_core.so[2616/2631] Linking build/bindings/python/ns/spectrum.so[2617/2631] Linking build/bindings/python/ns/sixlowpan.so[2618/2631] Linking build/bindings/python/ns/mobility.so[2619/2631] Linking build/bindings/python/ns/stats.so[2620/2631] Linking build/utils/ns3.26-test-runner-debug[2621/2631] Compiling src/fd-net-device/helper/tap-device-creator.cc[2622/2631] Compiling src/fd-net-device/helper/encode-decode.cc[2623/2631] Compiling src/fd-net-device/helper/creator-utils.cc[2624/2631] Linking build/src/fd-net-device/ns3.26-tap-device-creator-debug[2625/2631] Compiling src/fd-net-device/helper/raw-sock-creator.cc[2626/2631] Compiling src/fd-net-device/helper/encode-decode.cc[2627/2631] Compiling src/fd-net-device/helper/creator-utils.cc[2628/2631] Linking build/src/fd-net-device/ns3.26-raw-sock-creator-debug[2630/2631] Compiling src/tap-bridge/model/tap-encode-decode.cc[2630/2631] Compiling src/tap-bridge/model/tap-creator.cc[2631/2631] Linking build/src/tap-bridge/ns3.26-tap-creator-debugWaf: Leaving directory `/home/xuminghua/tmp/ns-allinone-3.26/ns-3.26/build'Build commands will be stored in build/compile_commands.json'build' finished successfully (14m15.932s)Modules built:antenna aodv applications bridge buildings config-store core csma csma-layout dsdv dsr energy fd-net-device flow-monitor internet internet-apps lr-wpan lte mesh mobility mpi netanim (no Python) network nix-vector-routing olsr point-to-point point-to-point-layout propagation sixlowpan spectrum stats tap-bridge test (no Python) topology-read traffic-control uan virtual-net-device visualizer wave wifi wimax Modules not built (see ns-3 tutorial for explanation):brite click openflow
测试ns-3
构建完成之后,我们就可以开始测试ns-3是否能运行了。
- 使用test.py进行测试 进入ns-3.26,键入以下命令:
./test.py -c core //测试ns-3发行版示范编译正确
输出如下所示:
……PASS: TestSuite traced-value-callbackPASS: TestSuite aodv-routing-id-cachePASS: TestSuite routing-aodvPASS: TestSuite routing-aodv-loopbackPASS: TestSuite routing-aodv-regressionPASS: TestSuite ns3-wifi-msdu-aggregatorPASS: TestSuite lte-frequency-reuse230 of 233 tests passed (230 passed, 3 skipped, 0 failed, 0 crashed, 0 valgrind errors)List of SKIPped tests: ns3-tcp-cwnd ns3-tcp-interoperability nsc-tcp-loss
由输出可以看出,除来未安装成功的三个依赖包,其他均测试成功。
- 运行脚本进行测试 运行ns-allinone-3.26/ns-3.26/scratch文件夹下的脚本文件scratch-simulator.cc 在ns-allinone-3.26/ns-3.26文件夹下,键入以下命令(因为waf在这个文件夹下,也可以将waf 和 waf.bat 移至scratch文件夹下再进行运行) $ ./waf --run scratch/scratch-simulator
waf首先执行检查以确保程序已经正确构建,并在需要时执行构建。然后执行该程序,产生以下输出:
Waf: Entering directory `/home/xuminghua/tmp/ns-allinone-3.26/ns-3.26/build'Waf: Leaving directory `/home/xuminghua/tmp/ns-allinone-3.26/ns-3.26/build'Build commands will be stored in build/compile_commands.json'build' finished successfully (1.912s)Scratch Simulator
输出了Scratch Simulator,表明ns-3网络仿真平台已经搭建完成来,接下来就是用你的代码进行编译,并进行数据可视化分析展示了。
NS-3仿真可视化
数据可视化主要有两种PyViz和NetAnim,都是作为可视化动画演示工具。
PyViz
- 使用参考网址:
PyViz安装
安装依赖包
sudo apt-get install python-dev python-pygraphviz python-kiwi python-pygoocanvas python-gnome2 python-gnomedesktop python-rsvg安装交互式Python使得GUI上有控制台按钮
sudo apt-get install ipython- PyViz测试
- Python脚本(3.26目录下)
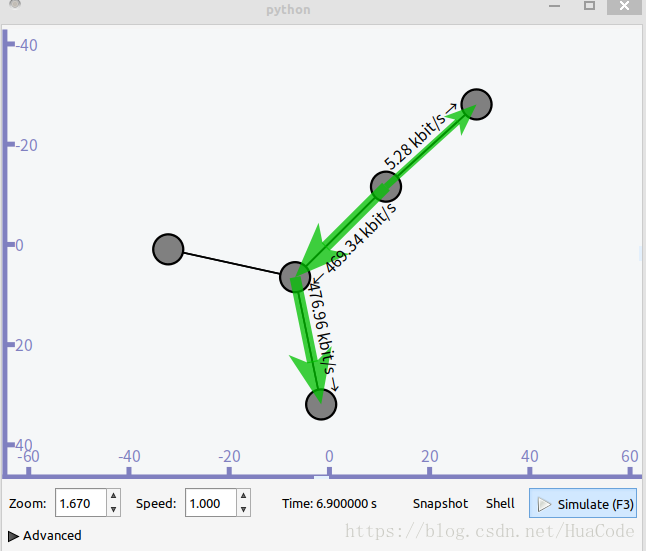
./waf --pyrun src/flow-monitor/examples/wifi-olsr-flowmon.py --visualize如图所示: - C++脚本(3.26目录下)
./waf --run src/olsr/examples/simple-point-to-point-olsr --vis如图所示: - 需要修改的脚本wscript文件
obj=bld.create_ns3_program('simple-point-to-point-olsr', ['point-to-point', 'internet', 'olsr', 'applications', 'wifi']) 修改成 obj=bld.create_ns3_program('simple-point-to-point-olsr', ['point-to-point', 'internet', 'olsr', 'applications', 'wifi', 'visualizer'])再次执行前面的代码
- Python脚本(3.26目录下)
NetAnim
- 使用参考网址:
NetAnim安装
- 安装依赖包
sudo apt-get install mercurial sudo apt-get install qt4-dev-tools - 下载并安装NetAnim
hg clone http://code.nsnam.org/jabraham3/netanim cd netanim make clean qmake NetAnim.pro (For MAC Users: qmake -spec macx-g++ NetAnim.pro) make 运行实例产生.xml文件供NetAnim解析
在src/netanim/examples目录下执行下面两个命令:
./waf --run "dumbbell-animation --nLeftLeaf=5 --nRightLeaf=5 --animFile=dumbbell.xml" ./waf --run "grid-animation --xSize=5 --ySize=5 --animFile=grid.xml"若出现”权限不够“,则退出到ns-3.26目录下,执行下面两条命令:
./waf --run "src/netanim/examples/dumbbell-animation --nLeftLeaf=5 --nRightLeaf=5 --animFile=dumbbell.xml" ./waf --run "src/netanim/examples/grid-animation --xSize=5 --ySize=5 --animFile=grid.xml"
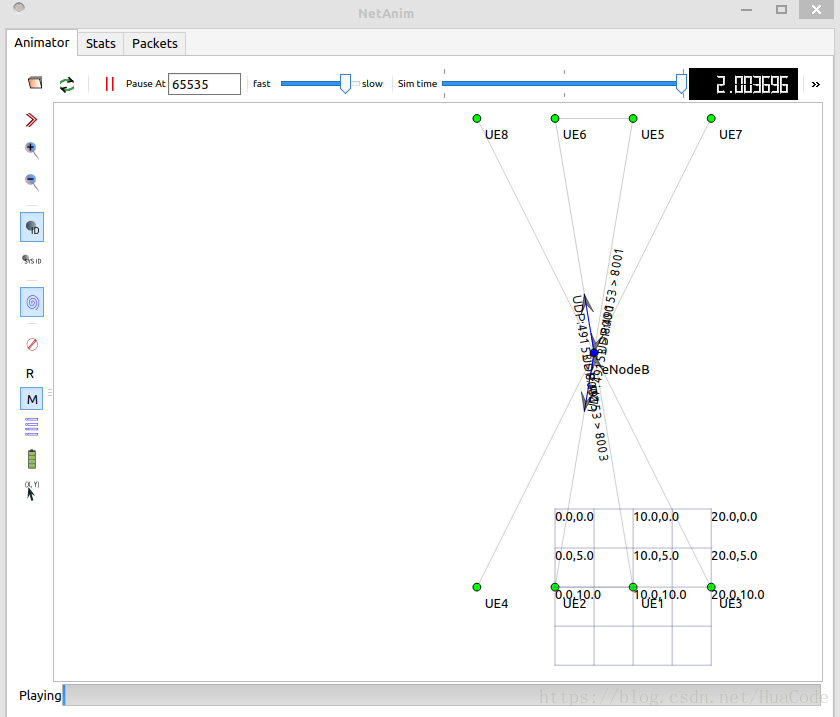
运行NetAnim来解析xml文件:
cd ns-allinone-3.26/netanim-3.107 ./NetAnim打开NetAnim界面如下:打开xml文件,进行解析:
- 安装依赖包

好了,以上就是整个平台的搭建以及可视化全过程……
最后再进行数据分析等过程……转载地址:https://blog.csdn.net/HuaCode/article/details/79767851 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
