【论文阅读】【3D目标检测】PV-RCNN++
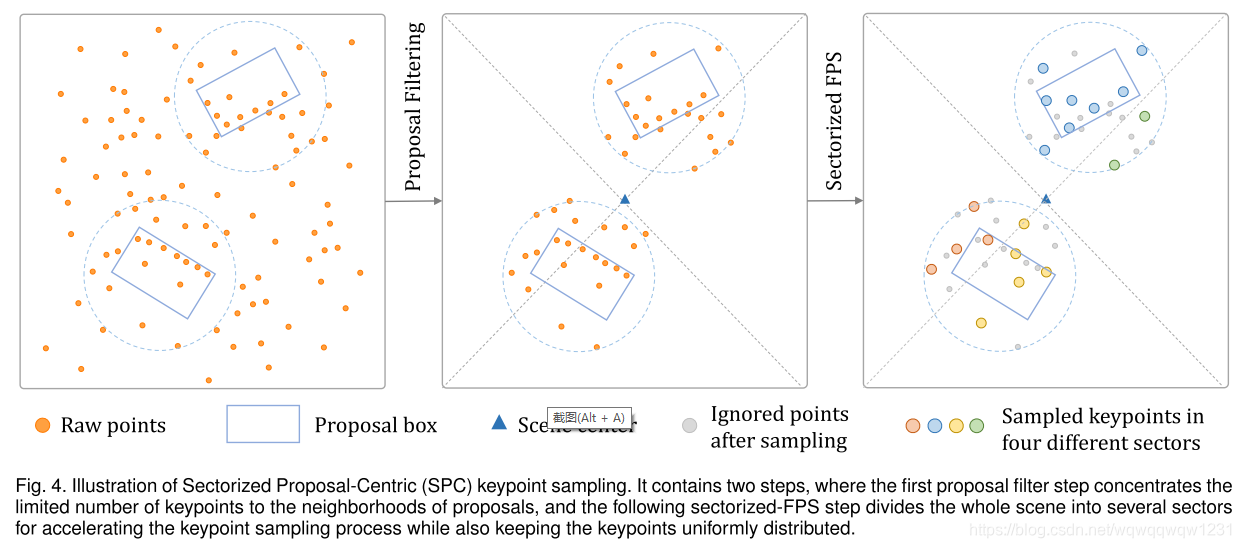 通过减少FPS输入点的数量,来降低FPS的计算时间。而且使得选出来的key point都在物体附近
通过减少FPS输入点的数量,来降低FPS的计算时间。而且使得选出来的key point都在物体附近  对于一个key point,在其周围构建一个voxel,然后对每个格子内的点做平均,然后用一个MLP做特征提取,然后把每个格子的特征拼接起来。
对于一个key point,在其周围构建一个voxel,然后对每个格子内的点做平均,然后用一个MLP做特征提取,然后把每个格子的特征拼接起来。
发布日期:2021-09-16 07:31:49
浏览次数:2
分类:技术文章
本文共 670 字,大约阅读时间需要 2 分钟。
文章目录
论文:PV-RCNN++: Point-Voxel Feature Set Abstraction With Local Vector Representation for 3D Object Detection
PVRCNN的作者又放出了PVRCNN++,主要在效率上做了改进。
PV-RCNN++
本文首先介绍了PVRCNN,然后基于PVRCNN的框架介绍了PVRCNN++的改进。PVRCNN就不介绍了,可以详见。
PVRCNN速度慢主要是慢在了point-based network这个部分。PVRCNN对做了如下改进。
SPC
FPS比较慢,因为FPS是 O ( n 2 ) O(n^2) O(n2)的时间复杂度。并且FPS是覆盖了整个场景的采样,大量的点会采在背景点上。所以作者提出SPC:第一步是用预测的proposal选出靠近物体的点,从而降低点的数量;第二步是将整个场景以激光雷达为原点,按角度分成多份,每个角度内,再用FPS。
通过减少FPS输入点的数量,来降低FPS的计算时间。而且使得选出来的key point都在物体附近 VectorPool aggregation
SA另外慢还慢在了要做radiusNN,而且SA用的MLP会丢失相对位置关系。所以作者提出了VectorPool的操作,如下图:
对于一个key point,在其周围构建一个voxel,然后对每个格子内的点做平均,然后用一个MLP做特征提取,然后把每个格子的特征拼接起来。 KITTI上报告的运算速度是每帧0.06s,感觉也已经很高了。
转载地址:https://blog.csdn.net/wqwqqwqw1231/article/details/113923665 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
路过按个爪印,很不错,赞一个!
[***.219.124.196]2024年04月13日 11时05分31秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
Matlab与C++混合编程
2019-04-27
unity3D 射线球体投射碰撞检测
2019-04-27
Unity3D 摇一摇功能
2019-04-27
unity3D 在屏幕边框创建碰撞框
2019-04-27
unity3D 音频播放
2019-04-27
xml中常用的转义符
2019-04-27
腾讯MSDK手Q微信授权登录
2019-04-27
腾讯MSDK for Unity
2019-04-27
关于MSDK的几个难点
2019-04-27
使用UnityEditor做工具
2019-04-27
Visual Studio我常用的快捷键
2019-04-27
写C# dll供Unity调用
2019-04-27
Linux制作run安装包
2019-04-27
一分钟学会C#解析XML
2019-04-27
unity AssetBundle的资源管理
2019-04-27
【转】Unity中HideInInspector和SerializeField一起使用
2019-04-27
单例模板类
2019-04-27
Unity与java相互调用
2019-04-27
android截屏代码
2019-04-27
unity NGUI图文混排
2019-04-27
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 307959636 位访客
访问时间: 2024-04-26 03:39:07
访问IP: 18.217.73.187
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版