本文共 964 字,大约阅读时间需要 3 分钟。
转自:http://zhidx.com/p/116225.html



| 厂商名称 | 所属国家 | 主要产品 | 首发时间 | 自由度 | 单臂 | 双臂 |
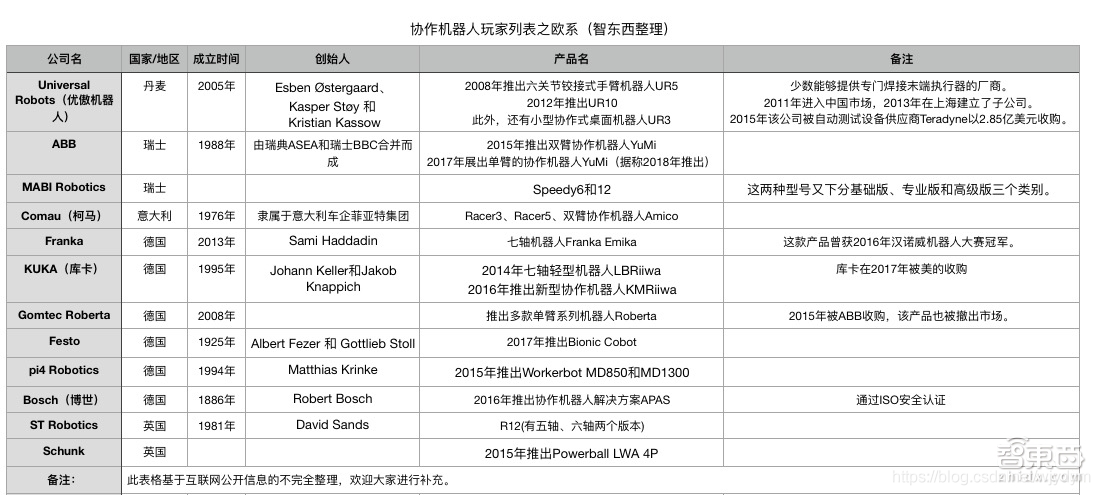
| Universal Robots | 丹麦 | UR3 UR5和UR10 | 2009 | 6轴 | √ | |
| Rethink Robotics | 美国 | Baxter Sawyer | 2012 | 7轴 | √ | √ |
| ABB | 瑞士 | YuMi和Roberta | 2015 | 7轴 | √ | √ |
| 库卡(KUKA) | 德国 | LBR iiwa7和LBR iiwa14 | 2013 | 7轴 | √ | |
| 发那科(Fanuc) | 日本 | CR-35iA CR-4iA CR-7iA及CR-7iA/L | 2014 | 6轴 | √ | |
| 安川电机(Yaskawa | 日本 | MOTOMAN-HC10和MotoMINI | 2015 | √ | ||
| 博世(Bosch) | 德国 | APAS | 2014 | √ | ||
| Bionic Robtics | 德国 | BioRob | √ | |||
| F&P Robotics | 瑞士 | P-Rob2(第二代) | 6轴 | √ | ||
| pi4_ robotics | 德国 | workerbot | √ | |||
| 邀博智能 | 中国 | AUBO-i5 | 2015 | 6轴 | √ | |
| 新松机器人 | 中国 | 柔性多关节机器人和双臂协作机器人 | 2015 | 7轴 | √ | √ |
| 大族电机 | 中国 | 大族机器人Elfin | 2016 | 6轴 | √ | |
| MABI Robotic | 瑞士 | Speedy10 | √ | |||
| 川田工业 | 日本 | Nextage | √ | |||
| Machi Fujukoshi | 日本 | MZ04和MZ07 | √ | |||
| 川畸重工 | 日本 | duAro | 2015 | 4轴 | √ | |
| Carbon Robotics | 美国 | Katia | ||||
| Franka Emika | 德国 | Franka Emika | √ | |||
| Denso | 日本 | Cobotta | √ | |||
| Liferobotics | 日本 | CORO | ||||
| Mecademic | 加拿大 | Mecademic Meca 500 | 6轴 | √ | ||
| Modbot | 美国 | 6 DOF-C | 6轴 | √ | ||
| Kinova Robotics | 加拿大 | jaco和Mico | √ | |||
| Comau | 意大利 | AURA | √ | |||
| 越疆科技 | 中国 | DOBOT M1 | 2016 | 4轴 | √ | |
| 敬科机器人 | 中国 | jk7 人机协作机器人和双臂机器人 | 2016 | 7轴 | √ | √ |
| 达明机器人 | 台湾 | TM5 | √ | |||
| 技美科技 | 中国 | Buddy 6F | 2016 | 6轴 | √ | |
| 山思跃立科技 | 中国 | WEE | √ |
转载地址:https://blog.csdn.net/wjydym/article/details/88934374 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
