本文共 645 字,大约阅读时间需要 2 分钟。
先来简单复习一下一般LPB特征是如何提取的,如下图:
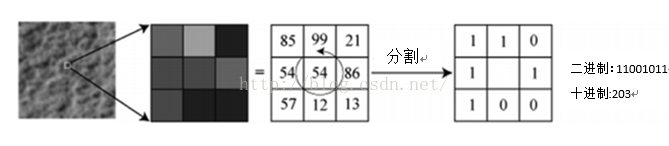
3*3尺寸的LBP提取过程
1.普通LBP
设LBP运算的像素点个数为p, 模式个数即是p个0或者1进行排列的可能数,也就是2^p种
2.均匀LPB模式
按照定义,考虑LBP特征序列跳变次数小于2的可能数目,分情况讨论:
(1)0次跳变,只有两种,即00...0或者111...1
(2) 1次跳变,两种可能,0—>1或者1—>0,比如00001111...111,或者111....10000
每一种情况都有p-1种,比如如果是1开头,那么必须要在后面的p-1个位置中的某一个位置完成一次跳变
两种情况下共2(p-1)种
(3) 两次跳变
0—>1—>0: 第一次跳变分别再位置2,位置3,位置4..., 位置p-1时,第二次跳变分别有p-2,p-3,...1种可能的跳变位置
所以共有p-2+p-3+....+1=(p-1)(p-2)/2种模式可能
1—>0—>1:同理有(p-1)(p-2)/2种模式可能
所以两次跳变可能有(p-1)(p-2)种模式
综上,对于Uniform LBP共有2+2(p-1)+(p-1)(p-2)=p(p-1)+2种模式可能
参考文献:On circular traffic sign detection and recognition Selcan Kaplan Berkaya∗, Huseyin Gunduz, Ozgur Ozsen, Cuneyt Akinlar, Serkan Gunal
转载地址:https://blog.csdn.net/xiaojiajia007/article/details/53173554 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
