本文共 5604 字,大约阅读时间需要 18 分钟。
文章目录
kinova GEN3 官方文件
有意向采购GEN3机械臂的客户,联系邮箱为ma.hongjiang@foxmail.com
这次是kinova公司来大连培训,自己整理的教程。在自己的电脑是可以操作的。
ubuntu版本:16.04
ros版本:kinetic官网技术文件:https://www.kinovarobotics.com/en/knowledge-hub/all-kinova-products
https://github.com/Kinovarobotics 师兄写的博客:https://blog.csdn.net/weixin_39312052/article/details/88200524  此处,我们用了: kortex:
此处,我们用了: kortex:https://github.com/Kinovarobotics/kortex ros_kortex:https://github.com/Kinovarobotics/ros_kortex ros_kortex_vision:https://github.com/Kinovarobotics/ros_kortex_vision 三个包 kinova GEN3 ip设置
kinova GEN3 有线连接设置
有线连接 转 无线链接(如果有线连接,可以使用默认ip地址全篇适用)
此操作使得主机ip与机械臂IP同属一个网段“”
windows下操作
参考:https://www.kinovarobotics.com/sites/default/files/UG-014_KINOVA_Gen3_Ultra_lightweight_robot-User_guide_EN_R01_0.pdf
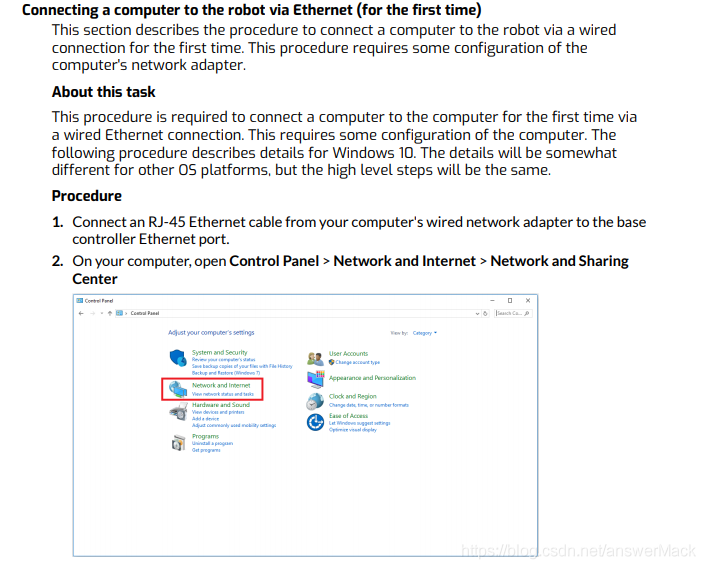 设置ipv4- -子掩码等,使得计算机与机械臂同一个网段内。
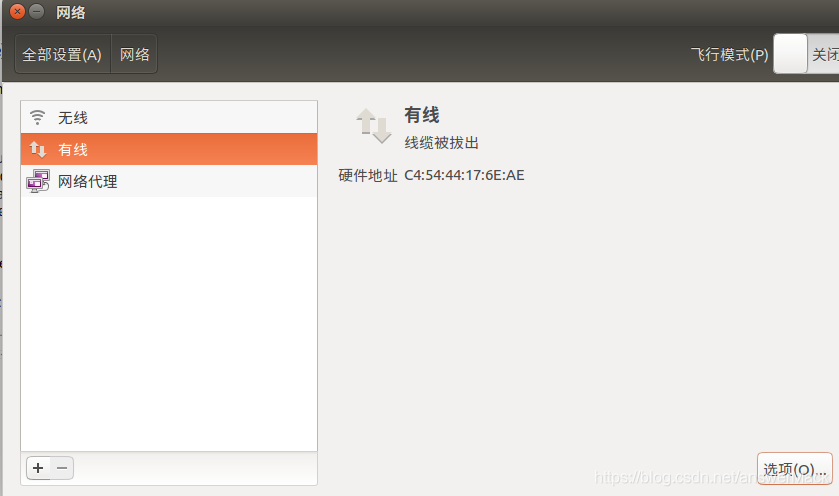
设置ipv4- -子掩码等,使得计算机与机械臂同一个网段内。 ubuntu下连接操作:
更改网络配置
 整理完以后,在浏览器输入:“192.168.1.10” 帐号密码都为:admin
整理完以后,在浏览器输入:“192.168.1.10” 帐号密码都为:admin kinova GEN3 无线连接设置
前提:执行完上述有线链接
在网页左侧选择: networks- -wifi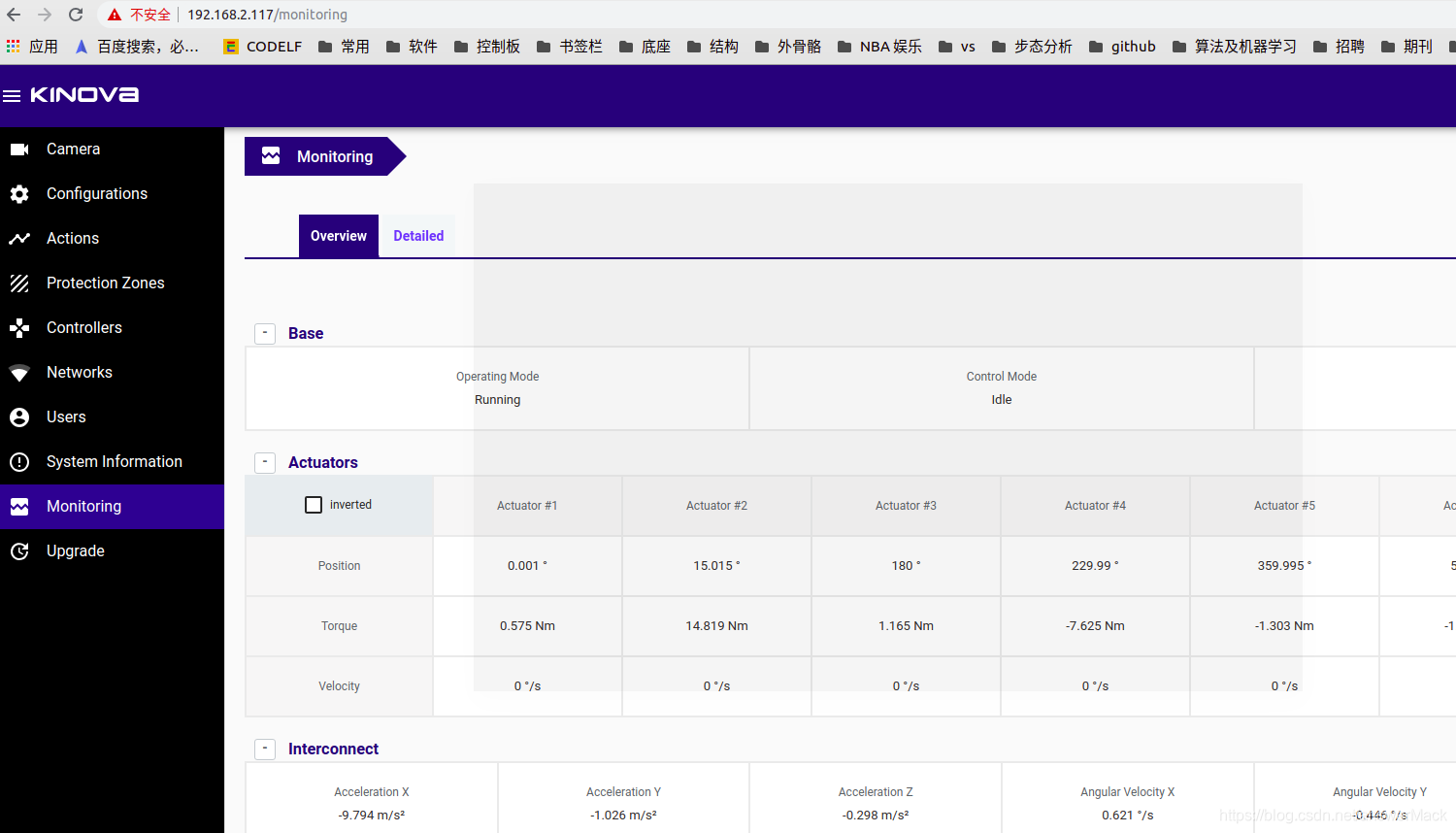
获得WIFI的ip地址
选择一个wifi连接, 刷新页面,重新进入kinova-wep,查看wifi-ipv4地址
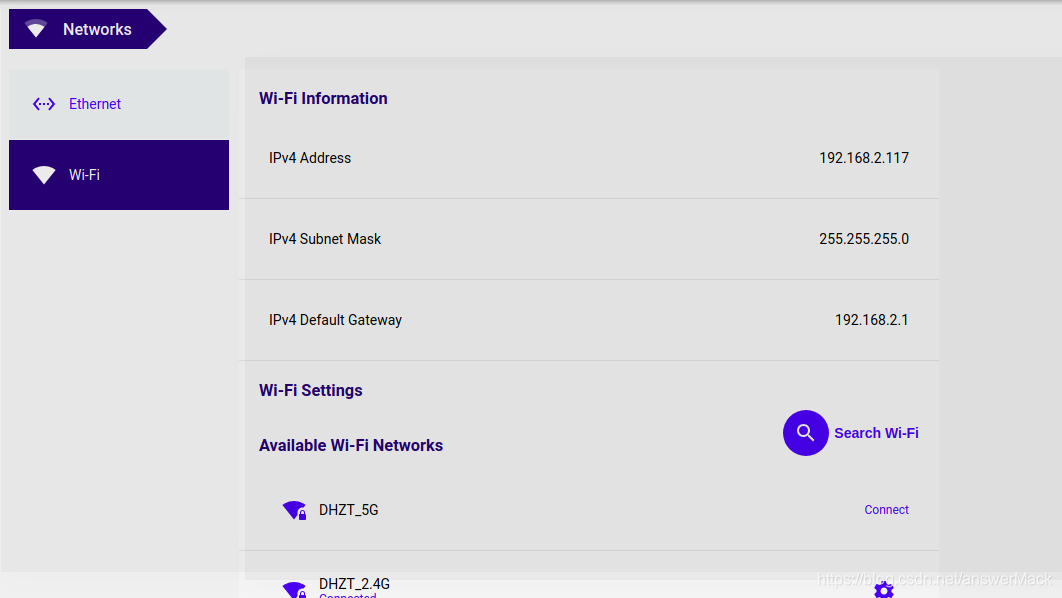
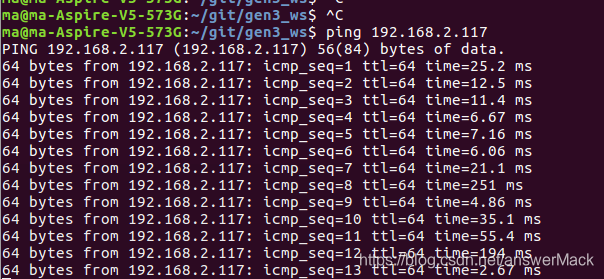
我们获得的这边的GEN3的ip地址为192.168.2.117。
所有以下操作均基于无线。此ip为 “192.168.2.117”
git github上kinovarobotics的文件
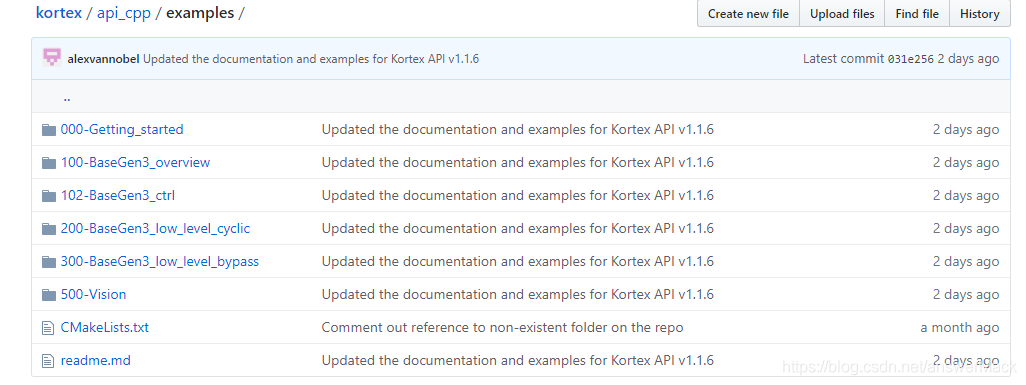
kortex 文件下调用api操作
下载kortex库:https://github.com/Kinovarobotics/kortex
https://github.com/Kinovarobotics/kortex/blob/master/api_cpp/examples/readme.md python教程:https://github.com/Kinovarobotics/kortex/blob/master/api_python/examples/readme.md CMAKE版本要求10.0以上 python>=3.5( ubuntu16.04里面有python3版本) gcc 5.4.0(ubuntu16.04支持) 我们下载的cmake3.14.1链接:https://cmake.org/download/ 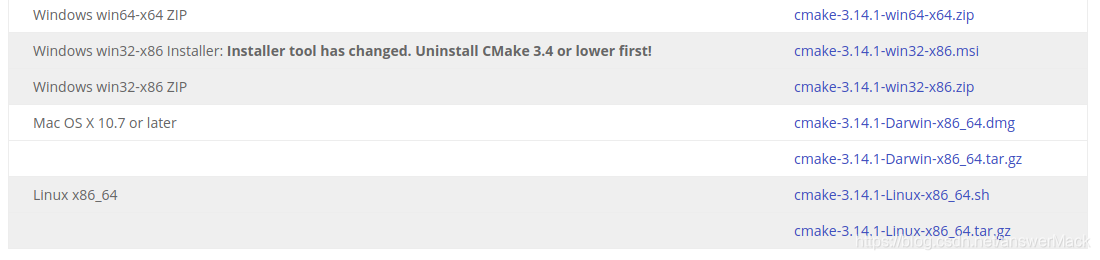 在主文件夹下解压后放到opt目录下:
在主文件夹下解压后放到opt目录下: sudo mv cmake-3.14.1-Linux-x86_64 /opt/
按照说明:
下载完 GitHub中的kortex包,然后 下载此api。
下载此api。 链接:https://drive.google.com/file/d/1ASbEsulf5cByru8Hy1oBZJyNDBa9H22C/view
c++ api配置
由于此API文件需要整理,整理过程大概如下,文件结构参考readme介绍:
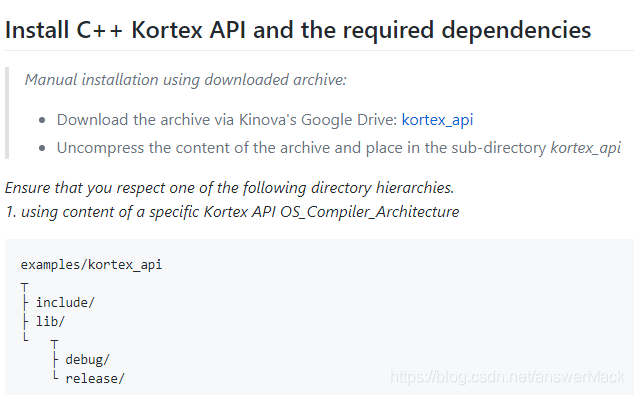
 下载好github中的kortex包,放到目录git下。 在git/kortex/api_cpp/examples/下新建文件夹kortex_api 将Google drive中下载的kortex_api文件中的linux_gcc_x86-64文件夹下的include和lib文件放到kortex/api_cpp/examples/下新建的文件夹kortex_api中。
下载好github中的kortex包,放到目录git下。 在git/kortex/api_cpp/examples/下新建文件夹kortex_api 将Google drive中下载的kortex_api文件中的linux_gcc_x86-64文件夹下的include和lib文件放到kortex/api_cpp/examples/下新建的文件夹kortex_api中。 直接放上整理好的包:
百度云整理好的链接:
链接:https://pan.baidu.com/s/1hYBWPkycdz32f9t2-a603g 提取码:tr17 调用c++ api操作
将百度云文件放到git文件夹下,提取到目录。
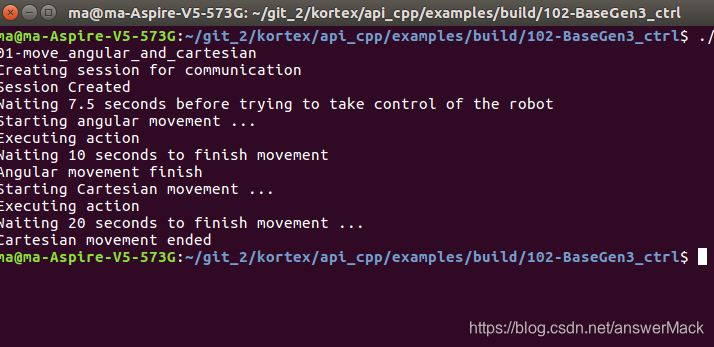
修改/home/ma/git/kortex/api_cpp/examples/102-BaseGen3_ctrl中的文件:
01-move_angular_and_cartesian.cpp,更改IP地址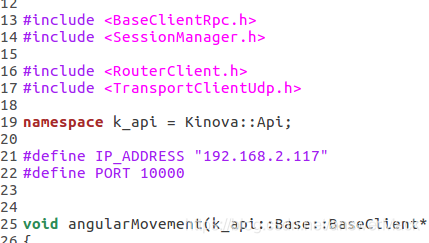
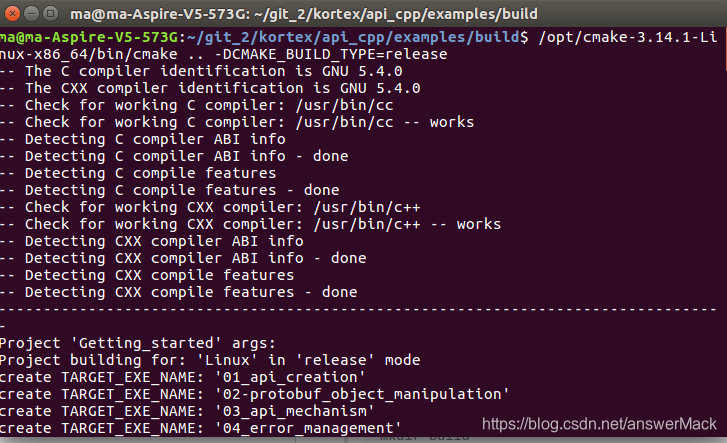
在/home/ma/git/kortex/api_cpp/examples新建build文件夹
/home/ma/git/kortex/api_cpp/examples/build终端中运行:
/opt/cmake---/bin/cmake .. -DCMAKE_BUILD_TYPE=release
make
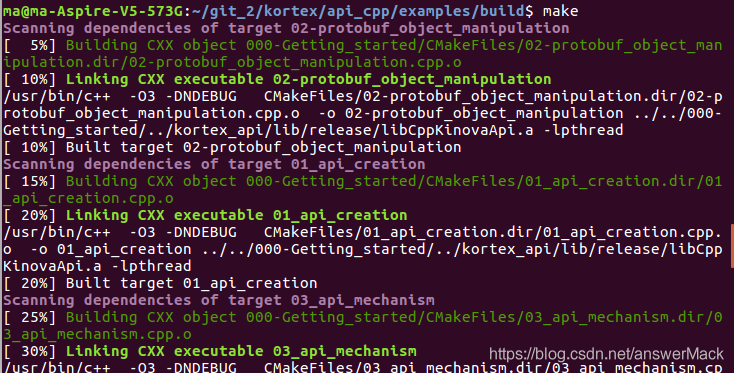
./01-move_angular_and_cartesian
https://github.com/Kinovarobotics/kortex/blob/master/api_cpp/doc/markdown/index.md python api配置
此包要求PYTHON>=3.5
此处需要安装python3.5(默认16.04是有的,因为自己整得重装了一遍ros,所以把他列出来)sudo add-apt-repository ppa:jonathonf/python-3.6 sudo apt-get updatesudo apt-get install python3.6
此处不需要调节优先级,不然会导致ros崩掉!!!!!!!!!!!!!!!!!
因为ros-kinetic用的是python2.7 用高版本则不能使用查看python默认版本:
python --version
查看python3版本:
python3 --version

python文件步骤地址链接:https://github.com/Kinovarobotics/kortex/tree/master/api_python/examples
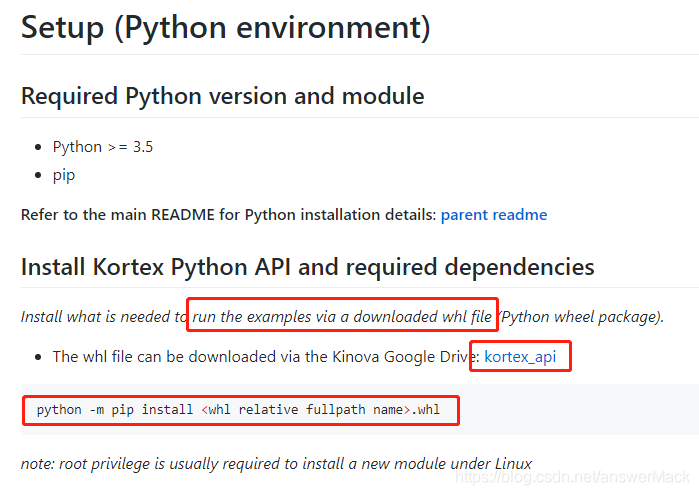 在之前目录git/kortex中, 在kortex/api_python/examples/下 将Google drive中下载的kortex_api文件中的python文件夹下的.whl 文件放到kortex/api_python/examples/下
在之前目录git/kortex中, 在kortex/api_python/examples/下 将Google drive中下载的kortex_api文件中的python文件夹下的.whl 文件放到kortex/api_python/examples/下 在/home/ma/git/kortex/api_python/examples/102-BaseGen3_ctrl 下更改 01-move_angular_and_cartesian.py文件 更改其中的ip地址为无线ip“192.168.2.117”。
调用python api操作
运行上述命令
python -m pip install 换成自己的文件名.whl
运行完成后,在/home/ma/git/kortex/api_python/examples/文件夹下的终端执行下图操作

(后续整理–此部分未完成,需要整理API文件)
ros控制机械臂操作与运行
在主文件夹下新建一个文件夹 git
在git文件夹下新建 gen3_ws 文件夹 这个可以下载此包进行编译。百度云链接:
链接:https://pan.baidu.com/s/1QfRy6xaETThNTmRNpRPXNQ 提取码:udsm 这个是配置好的,可以直接解压在git文件夹下 如果自己配置的话:
需要去github下载ros_kortex和ros_kortex_vision两个包 中间有个包: 链接:https://pan.baidu.com/s/1azFsVxWPZSQf1imhsSzcJw 提取码:pcw1 解压此包,查看里面的readme步骤
步骤1 添加依赖项等,包为百度云下载的
打开readme的操作步骤,里面会有讲解。
 可以打开readme文件。 若从上面下载的百度云,可以直接运行:
可以打开readme文件。 若从上面下载的百度云,可以直接运行: sudo chmod +x ./step2_install_dependencies.sh bash step2_install_dependencies.sh
安装此依赖电脑会重启(此step2文件运行时间较长,如果时间短,很有可能会有问题出现)
sudo chmod +x ./step5_proto_kortex.sh bash step5_proto_kortex.sh
此命令可能要等一分钟才会运行。 这个命令运行完可以把文件夹gen3_ws 下文件全部删除 重新解压上述百度云文件(此文件是从kinova公司员工那拷贝出来的) 安装此命令然后执行步骤3
步骤2 为按照readme文件执行步骤,自己装包
sudo chmod +x ./step2_install_dependencies.sh bash step2_install_dependencies.sh
安装此依赖电脑会重启
sudo chmod +x ./step3_install_opencv.sh bash step3_install_opencv.sh
安装opencv4.0.1
sudo chmod +x ./step4_ros.sh bash step4_ros.sh
安装ros程序
sudo chmod +x ./step5_proto_kortex.sh bash step5_proto_kortex.sh
确认依赖可以在运行step2文件。
运行完执行步骤3步骤3:编译包
路径选择图中路径:
 在gen3_ws文件夹下打开终端运行此命令。 运行时间较长 可以成功。
在gen3_ws文件夹下打开终端运行此命令。 运行时间较长 可以成功。 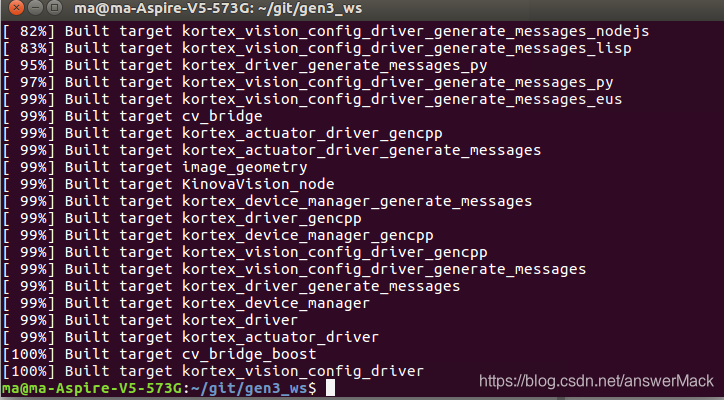 不成功的截图如果是下面这样的:
不成功的截图如果是下面这样的: 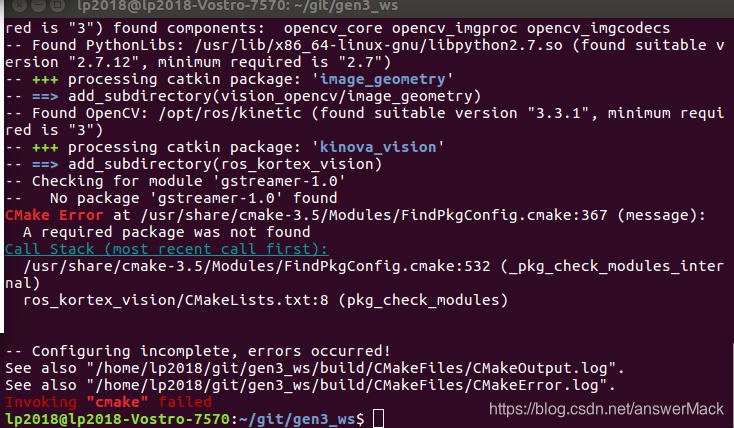
如果还是不成功的问题可能是:
1.依赖项添加不成功sudo chmod +x ./step2_install_dependencies.sh bash step2_install_dependencies.sh
重新执行上述命令。
然后重新去编译。 如果还不可以: 2.其他软件导致依赖项出现问题 可以打开step2的文件,逐条运行。 保证运行下面命令没有问题sudo apt-get updatesudo apt-get upgrade
例如:师兄电脑之前装迅雷出现问题,需要先解决这个问题
 解决完以后再运行依赖文件step2:
解决完以后再运行依赖文件step2: sudo chmod +x ./step2_install_dependencies.sh bash step2_install_dependencies.sh
最后在 gen3_ws下开终端source devel/setup.bash,然后运行catkin_make。
成功!!!!步骤4:启用操作GEN3,查看关节数据
启用ros
roscore
rosrun GEN3机械臂命令
确认好路径,然后在gen3文件夹source
 运行
运行 rosrun kortex_driver kortex_driver 192.168.2.117 100
此ip为机器人无线ip,无线连接接使用

rosrun kortex_examples PlayCartesian

rosservice call /SendTwistCommand "input: mode: 0 twist: {linear_x: 0.0, linear_y: 0.0, linear_z: 0.0, angular_x: 0.0, angular_y: 0.0, angular_z: 1.0} duration: 0" 此处将0.0改为了angular_z: 1.0,手臂末端会进行旋转。
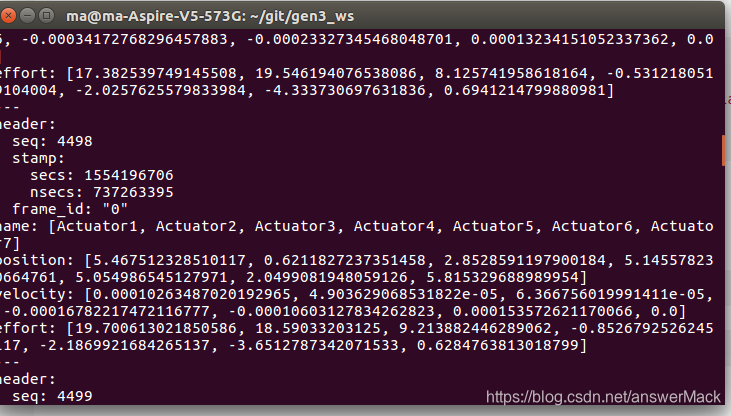
发送位置值。查看关节值:
rostopic list
rostopic echo /base_feedback/joint_state
在rviz调用GEN3 rgb摄像头
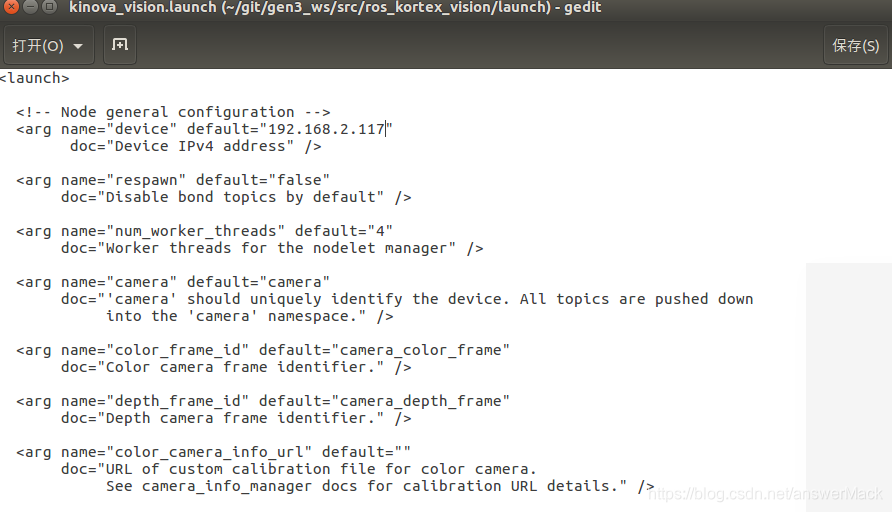
修改文件
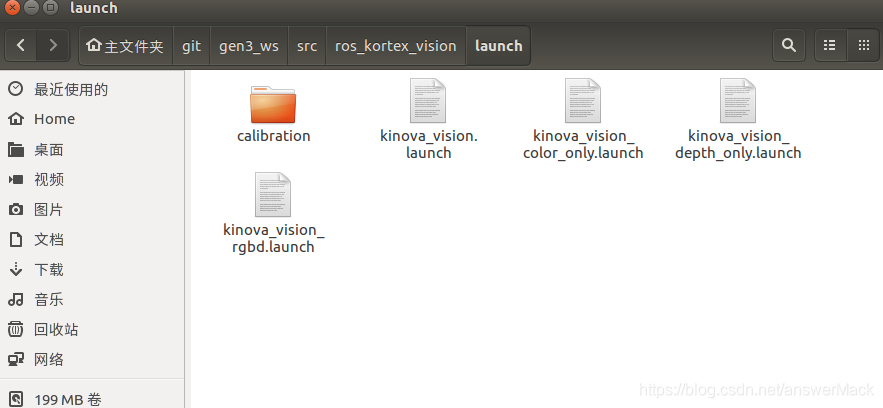
将其文件夹下的launch文件()中的ip地址改为192.168.2.117(此为上面无线连接ip)
若为有线链接,此IP地址改为GEN3机械臂地址,文件默认ip“192.168.1.10”
roslaunch kinova_vision kinova_vision_rgbd.launch
启用RVIZ
在命令行输入rviz
将rviz全屏(一定要这样)怕选择file时出错
在rviz下, 打开下面这个文件 file-open file ,选择下面路径,找到此文件打开: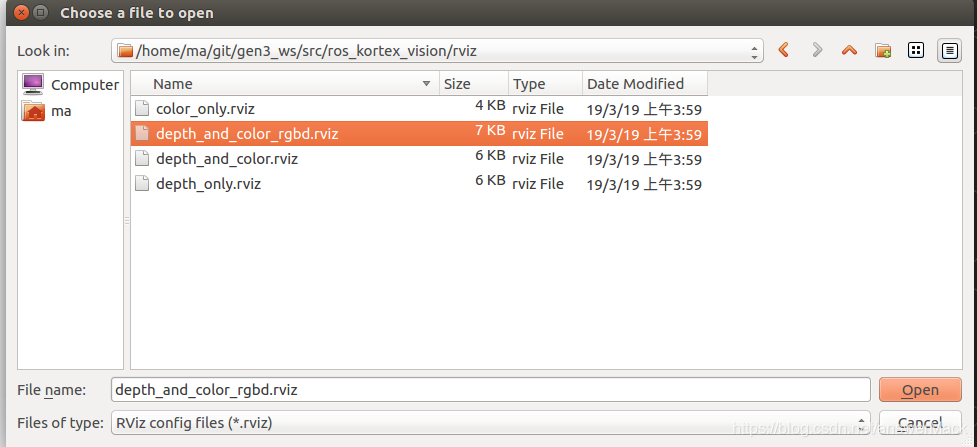 便可以实现可视化。
便可以实现可视化。 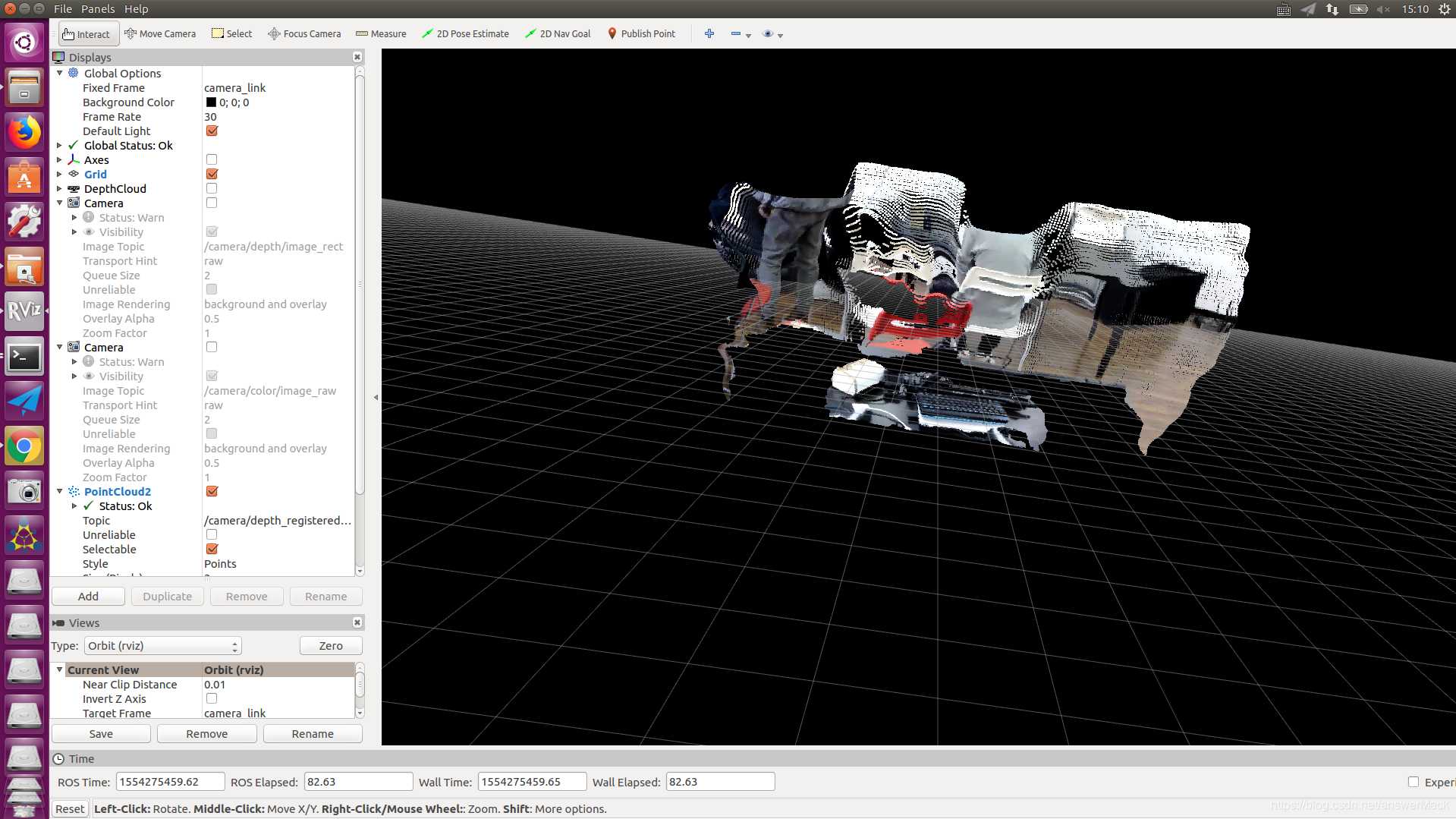
后续修改会补充
2019.04.02
2019.04.03 2019.04.04 (非公司员工)转载地址:https://blog.csdn.net/answerMack/article/details/88977827 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
