matlab robotics toolbox 代码解释整理



发布日期:2022-01-20 01:08:02
浏览次数:1
分类:技术文章
本文共 372 字,大约阅读时间需要 1 分钟。
文章目录
1.1-DHFactor 函数无法运行
参考教程:
问题1:尝试将 SCRIPT DHFactor 作为函数执行: E:\matlab2017\toolbox\rvctools\robot\DHFactor.m
解决方法:打开rvctools文件夹,运行startup_rvc文件,重新安装机器人工具箱。或在命令行 输入startup_rvc。1.2-mstraj函数
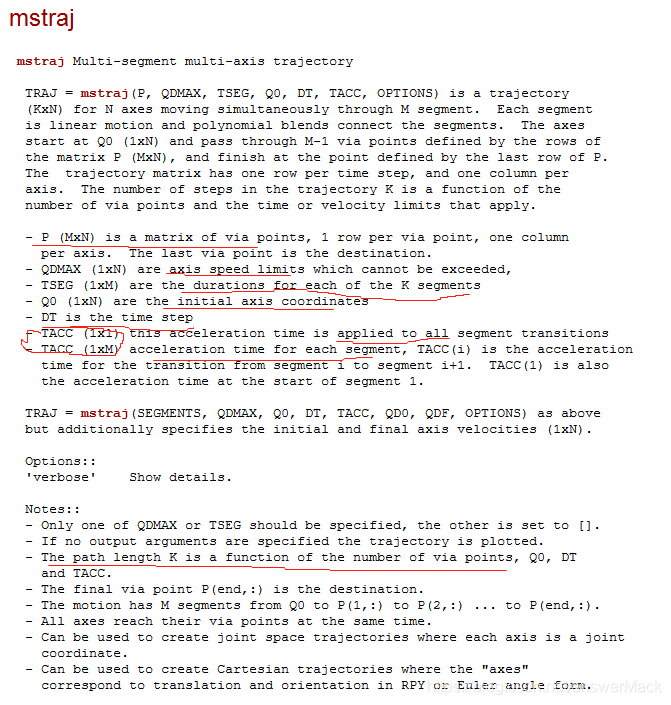
mstraj:多段轨迹规划
参考: 第三个参数为设置path的各段运行时间。 1.3-ikine函数
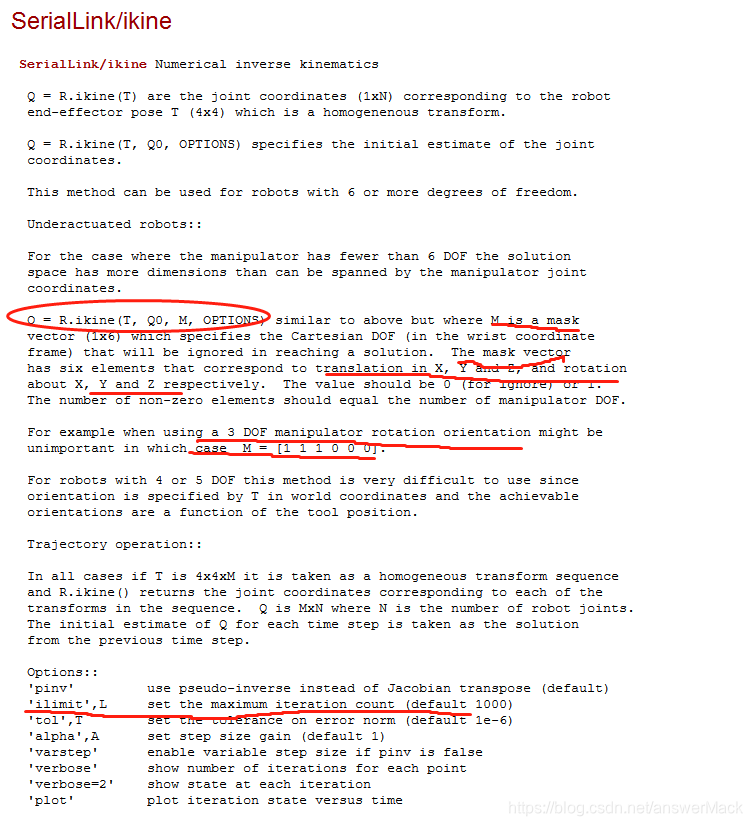
ikine:
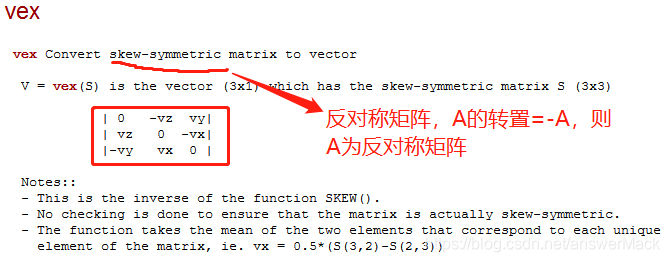
1.4-vex函数
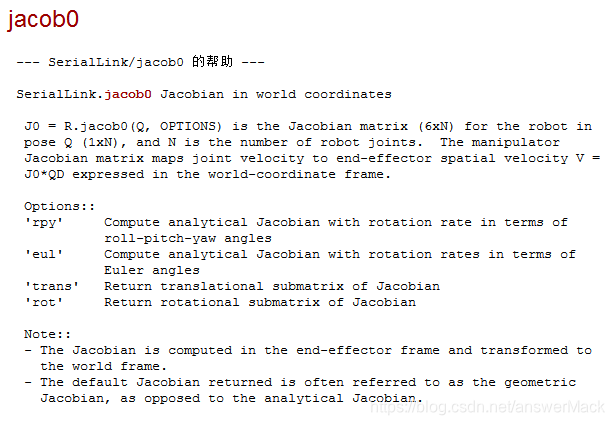
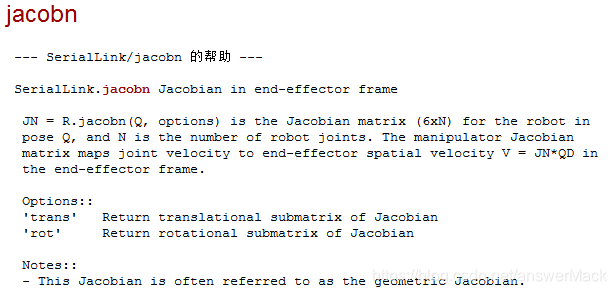
1.5-jacob0、jacobn函数

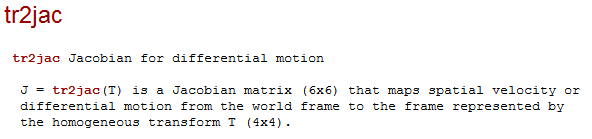
1.6-tr2jac函数
J为雅可比矩阵(6×6),将空间速度或差分运动从世界帧映射到由均匀变换T(4×4)表示的坐标系。
1.7-jsingu函数
此依赖关系表示关联的关节轴并导致奇点
转载地址:https://blog.csdn.net/answerMack/article/details/97141751 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
哈哈,博客排版真的漂亮呢~
[***.90.31.176]2024年04月23日 08时41分47秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
linux c : get curent tty info
2019-04-27
passwd没读取/etc/pam.d/system-auth
2019-04-27
DirectX环境的修复
2019-04-27
use popen replace temp file
2019-04-27
抓包分析中判断tcp连接开始和断开
2019-04-27
svn patch 文件输出格式的含义
2019-04-27
debian - 使用root身份登录sftp
2019-04-27
use vnc + xrdp connect debian9.6 from win10
2019-04-27
chromium - 测试程序使用base空间的类
2019-04-27
chromium - base::Bind类成员函数
2019-04-27
chromium - base::Bind take parameter
2019-04-27
chromium - get value from base:Value
2019-04-27
chromium - using special class
2019-04-27
chromium - post task for web-ui
2019-04-27
chromium - ERR_CONTENT_DECODING_FAILED
2019-04-27
调试: 删除vs2008项目历史记录
2019-04-27
工具类: 多国语言字符串操作类
2019-04-27
reset debian7 local root password
2019-04-27
experiment: UI中的资源字符串国际化
2019-04-27
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 307980903 位访客
访问时间: 2024-04-26 05:48:59
访问IP: 18.225.117.183
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版