【路径规划】基于改进动态窗口DWA算法机器人静态避障matlab源码
 2 速度采样
2 速度采样 
发布日期:2021-05-04 12:56:13
浏览次数:22
分类:技术文章
本文共 6597 字,大约阅读时间需要 21 分钟。
一、简介
DWA算法全称为dynamic window approach,其原理主要是在速度空间(v,w)中采样多组速度,并模拟这些速度在一定时间内的运动轨迹,再通过一个评价函数对这些轨迹打分,最优的速度被选择出来发送给下位机。
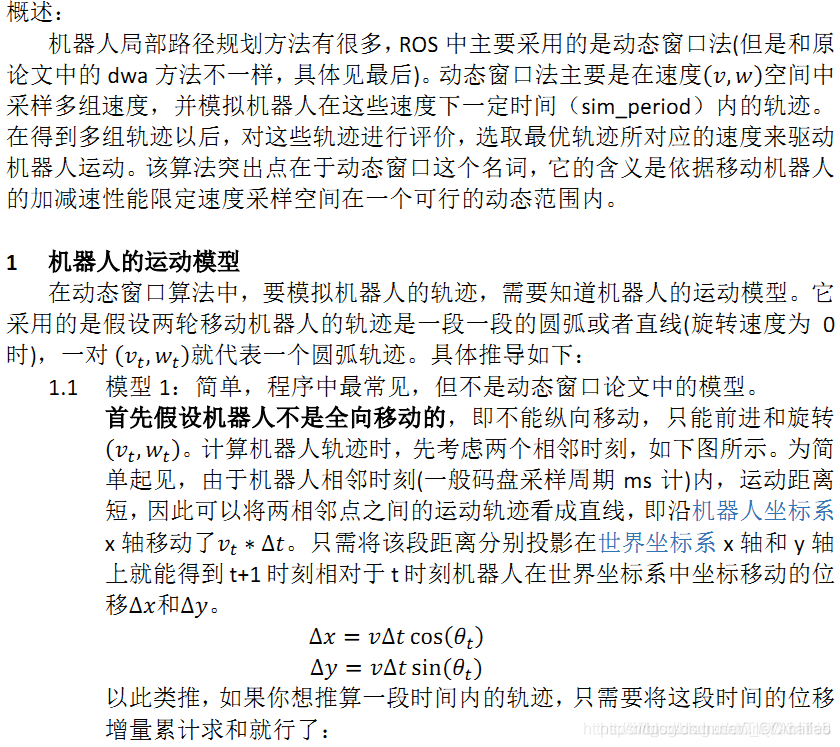
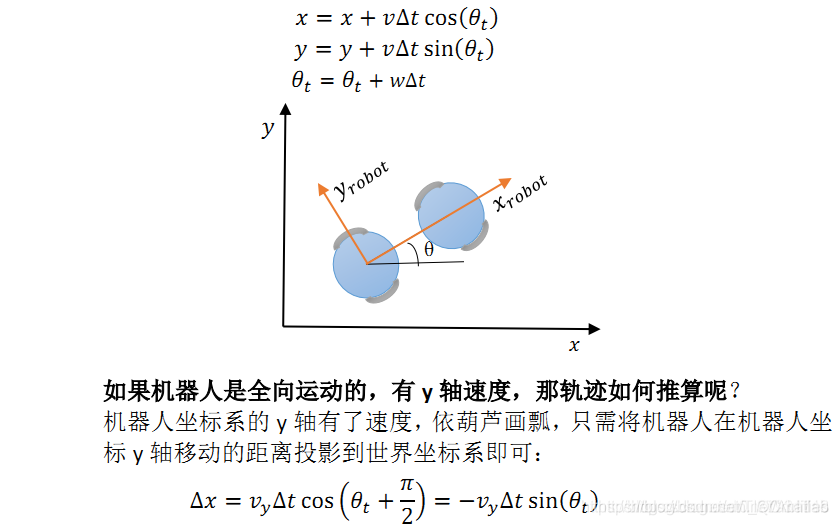
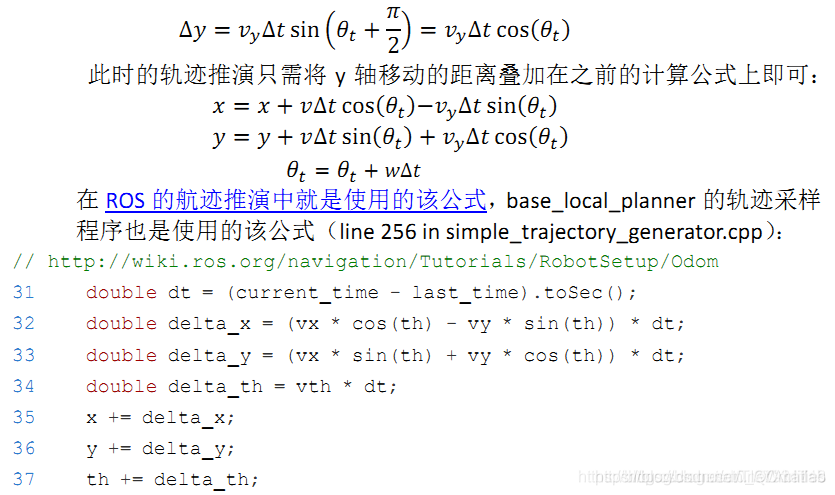
1 原理分析 2 速度采样 机器人的轨迹运动模型有了,根据速度就可以推算出轨迹。
因此只需采样很多速度,推算轨迹,然后评价这些轨迹好不好就行了。 (一)移动机器人受自身最大速度最小速度的限制 (二) 移动机器人受电机性能的影响:由于电机力矩有限,存在最大的加減速限制,因此移动机器人軌迹前向模拟的周期sim_period内,存在一个动态窗口,在该窗口内的速度是机器人能够实际达到的速度: (三) 基于移动机器人安全的考虑:为了能够在碰到障碍物前停下来, 因此在最大减速度条件下, 速度有一个范围。二、源代码
% ------------------------------------------------------------------------- function [] = ADynamicWindowApproachSample() close all; clear all; disp('Dynamic Window Approach sample program start!!') x=[0 0 pi/2 0 0]';% 机器人的初期状态[x(m),y(m),yaw(Rad),v(m/s),w(rad/s)] goal=[12,5];% 目标点位置 [x(m),y(m)] % 障碍物位置列表 [x(m) y(m)] % obstacle=[0 2; % 4 2; % 4 4; % 5 4; % 5 5; % 5 6; % 5 9 % 8 8 % 8 9 % 7 9]; obstacle=[-0.9 2; -0.8 2; -0.7 2; -0.6 2; -0.4 2; -0.2 2; -0.1 2; 0 2; 0 2.1; 0 2.2; 0 2.3; 0 2.4; 0 2.5; 0 2.6; 0 2.7; 0 2.8; 0 2.9; 0 3; 0 3.1; 0 3.2; 0 3.3; 0 3.4; 0 3.5; 0 3.6; 0 3.7; 0 3.8; 0 3.9; 0 4; 0 4.1; 0 4.2; 0 4.3; 0 4.4; 0 4.5; 0 4.6; 0 4.7; 0 4.8; 0 4.9; 0 5; 0 5.1; 0 5.2; 0 5.3; 0 5.4; 0 5.5; 0 5.6; 0 5.7; 0 5.8; 0 5.9; 0 6; -0.1 6; -0.2 6; -0.3 6; -0.4 6; -0.5 6; -0.6 6; -0.7 6; -0.8 6; -0.9 6; 2 2;%U型障碍物开始 2 2.1; 2 2.2; 2 2.3; 2 2.4; 2 2.5; 2 2.6; 2 2.7; 2 2.8; 2 2.9; 2 3; 2 3;%U型障碍物封口开始 2 3.1; 2 3.2; 2 3.3; 2 3.4; 2 3.5; 2 3.6; 2 3.7; 2 3.8; 2 3.9; 2 4; 2 4; 2 4.1; 2 4.2; 2 4.3; 2 4.4; 2 4.5; 2 4.6; 2 4.7; 2 4.8; 2 4.9; 2 5; 2 5; 2 5.1; 2 5.2; 2 5.3; 2 5.4; 2 5.5; 2 5.6; 2 5.7; 2 5.8; 2 5.9; 2 6; 2 5; 2 6.1; 2 6.2; 2 6.3; 2 6.4; 2 6.5; 2 6.6; 2 6.7; 2 6.8; 2 6.9; 2 7; 2 7.1; 2 7.2; 2 7.3; 2 7.4; 2 7.5; 2 7.6; 2 7.7; 2 7.8; 2 7.9; 2 8;% 6 3;% 6 3.1;% 6 3.2;% 6 3.3;% 6 3.4;% 6 3.5;% 6 3.6;% 6 3.7;% 6 3.8;% 6 3.9;% 6 4;% 6 4.1;% 6 4.2;% 6 4.3;% 6 4.4;% 6 4.5;% 6 4.6;% 6 4.7;% 6 4.8;% 6 4.9;% 6 5;% 6 5.1;% 6 5.2;% 6 5.3;% 6 5.4;% 6 5.5;% 6 5.6;% 6 5.7;% 6 5.8;% 6 5.9;% 6 6;% 6 6.1;% 6 6.2;% 6 6.3;% 6 6.4;% 6 6.5;% 6 6.6;% 6 6.7;% 6 6.8;% 6 6.9;% 6 7; 7 2; 7 2.1; 7 2.2; 7 2.3; 7 2.4; 7 2.5; 7 2.6; 7 2.7; 7 2.8; 7 2.9; 7 3; 7 3.1; 7 3.2; 7 3.3; 7 3.4; 7 3.5; 7 3.6; 7 3.7; 7 3.8; 7 3.9; 7 4; 7 4.1; 7 4.2; 7 4.3; 7 4.4; 7 4.5; 7 4.6; 7 4.7; 7 4.8; 7 4.9; 7 5; 7 5.1; 7 5.2; 7 5.3; 7 5.4; 7 5.5; 7 5.6; 7 5.7; 7 5.8; 7 5.9; 7 6; 7 6.1; 7 6.2; 7 6.3; 7 6.4; 7 6.5; 7 6.6; 7 6.7; 7 6.8; 7 6.9; 7 7; 7 7.1; 7 7.2; 7 7.3; 7 7.4; 7 7.5; 7 7.6; 7 7.7; 7 7.8; 7 7.9; 7 8; 2 8; 2.1 8; 2.2 8; 2.3 8; 2.4 8; 2.5 8; 2.6 8; 2.7 8; 2.8 8; 2.9 8; 3 8; 3.1 8; 3.2 8; 3.3 8; 3.4 8; 3.5 8; 3.6 8; 3.7 8; 3.8 8; 3.9 8; 4 8; 4.1 8; 4.2 8; 4.3 8; 4.4 8; 4.5 8; 4.6 8; 4.7 8; 4.8 8; 4.9 8; 5 8; 5.1 8; 5.2 8; 5.3 8; 5.4 8; 5.5 8; 5.6 8; 5.7 8; 5.8 8; 5.9 8; 6 8; 6.1 8; 6.2 8; 6.3 8; 6.4 8; 6.5 8; 6.6 8; 6.7 8; 6.8 8; 6.9 8; 7 8; 2 2; 2.1 2; 2.2 2; 2.3 2; 2.4 2; 2.5 2; 2.6 2; 2.7 2; 2.8 2; 2.9 2; 3 2; 3.1 2; 3.2 2; 3.3 2; 3.4 2; 3.5 2; 3.6 2; 3.7 2; 3.8 2; 3.9 2; 4 2; 4.1 2; 4.2 2; 4.3 2; 4.4 2; 4.5 2; 4.6 2; 4.7 2; 4.8 2; 4.9 2; 5 2; 5.1 2; 5.2 2; 5.3 2; 5.4 2; 5.5 2; 5.6 2; 5.7 2; 5.8 2; 5.9 2; 6 2; 6.1 2; 6.2 2; 6.3 2; 6.4 2; 6.5 2; 6.6 2; 6.7 2; 6.8 2; 6.9 2; 7 2; 2 3;% 2.1 3;% 2.2 3;% 2.3 3;% 2.4 3;% 2.5 3;% 2.6 3;% 2.7 3;% 2.8 3;% 2.9 3;% 3 3;% 3.1 3;% 3.2 3;% 3.3 3;% 3.4 3;% 3.5 3;% 3.6 3;% 3.7 3;% 3.8 3;% 3.9 3;% 4 3;% 4.1 3;% 4.2 3;% 4.3 3; 三、运行结果

四、备注
完整代码或者代写添加QQ1575304183
转载地址:https://blog.csdn.net/qq_34763204/article/details/116379654 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
路过按个爪印,很不错,赞一个!
[***.219.124.196]2024年04月09日 23时11分19秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
我用过的设计模式(5)-- 中介者模式
2019-04-27
为实习准备的数据结构(9)-- 跳表
2019-04-27
为实习准备的数据结构(10)-- 哈希散列表
2019-04-27
为实习准备的数据结构(11)-- 图论算法 集锦
2019-04-27
“为实习准备的数据结构” 系列 -- 导航篇
2019-04-27
hiredis从安装到实操,一条龙服务
2019-04-27
【C++】算法集锦(7)滑动窗口
2019-04-27
高性能MySQL(三):Schema与数据类型优化
2019-04-27
【C++】算法集锦(8):从两数和问题拓展到一百数和问题
2019-04-27
【C++】算法集锦(9):背包问题
2019-04-27
【C++】算法集锦(10)通俗讲kmp算法
2019-04-27
【C++】算法集锦(12):高楼扔鸡蛋
2019-04-27
【图解】拥塞控制
2019-04-27
线程上下文切换
2019-04-27
什么是服务熔断?
2019-04-27
服务器压力过大?CPU打满?我来帮你快速检查Linux服务器性能
2019-04-27
C++面经总结之《Effective C++》(一)
2019-04-27
C++面经总结之《Effective C++》(二)
2019-04-27
打开我的收藏夹 -- Python爬虫篇(2)
2019-04-27
这是什么“虎狼之词”啊!!!程序员的健康问题,看一线老中医怎么说!!!
2019-04-27
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 307845447 位访客
访问时间: 2024-04-25 16:28:07
访问IP: 3.141.193.158
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版