本文共 1463 字,大约阅读时间需要 4 分钟。
分享人工智能技术干货,专注深度学习与计算机视觉领域!
OpenCV为我们提供了一个非常方便的边缘检测接口Canny函数,该函数的命名是以其发明者Jhon F.Canny命名的,自1986年被发明后该算法就一直很受欢迎,其不容易受噪声的干扰,它的双阈值法可以分别检测到强边缘和弱边缘,并且仅当弱边缘与强边缘相连时,才将弱边缘包含在输出结果中,这就保障了检测到真正的弱边缘。Canny算法不仅效果好,其使用也非常简便,仅需一行代码即可实现边缘检测,一般其工作原理如下:
1)使用高斯滤波器对图像进行平滑去噪;
2)计算输入图像梯度;
3)在边缘上使用非极大值抑制(NMS)进行过滤;
4)在检测到的边缘上使用双阈值法去除假阳性;
5)分析所有的边缘及其之间的连接,以保留真正的边缘并消除不明显的边缘;
该接口的定义及其形参说明如下:
Canny(image, threshold1, threshold2, edges=None, apertureSize=None, L2gradient=None)
image:输入的8bit图像
threshold1:阈值1
threshold2:阈值2
edges:输出的边缘图像,8bit单通道,宽高与输入图像一致
apertureSize:Sober算子核大小
L2gradient:是否使用更精确的方式计算梯度,True使用,否则不用
Canny函数还有另外一种接口定义,其说明如下:
Canny(dx, dy, threshold1, threshold2[, edges[, L2gradient]])
dx:输入图像在x方向的导数:16-bit(CV_16SC1或CV_16SC3)
dy:输入图像在y方向的导数:16-bit(CV_16SC1或CV_16SC3)
threshold1:同上
threshold2:同上
edges:同上
L2gradient:同上
一般来说,梯度小于阈值1则认为不是边缘,梯度大于阈值2则认为是强边缘,而介于阈值1和阈值2之间的则认为是弱边缘,只有弱边缘与强边缘相连,算法才会视该像素点为边缘进行保留,否则就不是从而抛弃掉。
而对于L2gradient参数,其将计算图像梯度方式导向不同的公式,一般会存在如下两种情况:
True:
False:
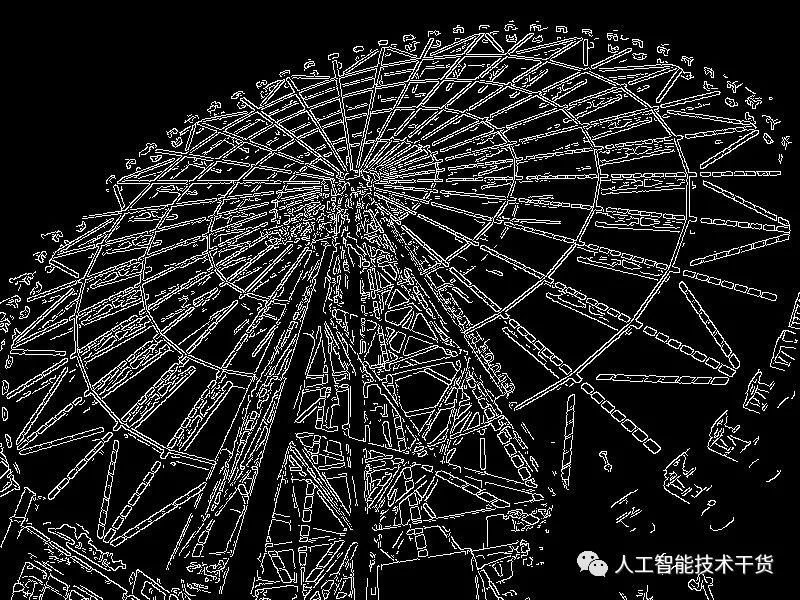
我们以如下摩天轮来举例说明Canny边缘检测算法的一般使用示例:

示例代码如下:
# -*- coding:utf-8 -*-#!/usr/bin/env pythonimport cv2def detect_edges(img_path): img_gray = cv2.imread(img_path, cv2.CV_LOAD_IMAGE_GRAYSCALE) img_edges = cv2.Canny(img_gray, 150, 250) cv2.imwrite("canny_edge_img.jpg", img_edges) if __name__ == '__main__': img_path = 'original.jpg' detect_edges(img_path) 运行该示例代码后的输出结果如下:
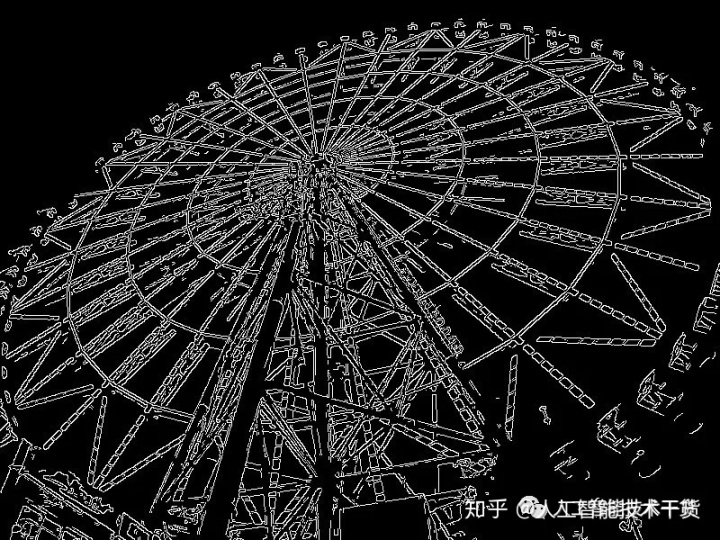
实际上,两个阈值需要依据具体情况进行调试设定,否则会得到不一样的效果!
关于Canny边缘检测算法的更多详情,还可以访问如下链接获得:
http://en.wikipedia.org/wiki/Canny_edge_detector
转载地址:https://blog.csdn.net/weixin_33673142/article/details/112349276 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
