本文共 13256 字,大约阅读时间需要 44 分钟。
import visdom # 开外网 1:pip install visdom 2:sudo python -m visdom.server ✅
visdom 是可视化web视图
import os, glob ✅
os os 模块在运维工作中是很常用的一个模块。通过os模块调用系统命令。os模块可以跨平台使用。
1.os.listdir():返回输入路径下的文件和列表名称 经过os.listdir()操作之后,pokemon文件夹下的所有文件全部被读取作为list的元素,但是如果是文件夹,那么只读取文件夹的名字,但如果是文件则会读取文件的名字并带属性后缀(.py/.csv/.word/etc) 2.os.path.join():拼接待操作对象 经过.os.path.join()操作之后,会将两个路径进行拼接 3.os.path.isdir():判断输入路径是否为目录或文件夹 一般而言这个操作会和os.path.join()结合起来使用。先进行拼接再进行判断。在自建数据集的时候这么用比较好哦。返回 true 或 False 链接: .glob glob是python自带的一个文件操作相关模块,用它可以查找符合自己目的文件,类死于Windows下的文件搜索,支持通配符操作,有“”、“?”、“[]”这三个通配符,“”:代表0个或者多个字符;“?”:代表一个字符;“[]”:匹配指定范围内的字符,如[0-9]匹配数字;主要有以下2个主要方法。 1.glob方法: glob模块的主要方法就是glob,该方法返回所有匹配的文件路径列表(list);该方法需要一个参数用来制定匹配的路径字符串(字符串可以为绝对路径也可以为相对路径),其返回文件名只包括当前目录里的文件名,不包括子文件夹里的文件。 比如: import glob glob.glob(’.txt’) #这里就是获取此文件的路径下所有的txt文件并返回一个list。如QQ.txt、44.txt
glob.glob(‘glob_?.png’) #这里就是获取路径下所有的 glob_().png文件并返回一个list,如:glob_1.png\glob_q.png glob.glob(‘glob_[0-9].png’) #这里就是获取次路径下下划线后面数字是-0-9的文件并返回为一个list glob.glob('glob_[0-9].’) #这里就是获取路径下所有文件名为glob_(0-9范围内)的所有文件random random() 方法返回随机生成的一个实数,它在[0,1)范围内。
CSV csv文件格式是一种通用的电子表格和数据库导入导出格式
————————pokemon.py—自定义数据集文件————————
import torchimport os, globimport random, csvfrom torch.utils.data import Dataset, DataLoader #所有自定义数据集的母类from torchvision import transformsfrom PIL import Imageclass Pokemon(Dataset): def __init__(self, root, resize, mode): # root 资源地址位置 / resize 图片输出尺寸 / mode 包含train、validation、test super(Pokemon, self).__init__() self.root = root self.resize = resize# <拿到名称及编号> self.name2label = { } # "sq.......":0 for name in sorted(os.listdir(os.path.join(root))): # 遍历根目录下所有东西 ; listdir返回顺序不固定,用sorted排序 if not os.path.isdir(os.path.join(root,name)): # 因为会进来所有目录和对应文件,所以首先我们要过滤掉文件 continue # 构建字典,名字:0~4数字 self.name2label[name] = len(self.name2label.keys()) # eg: {'squirtle': 4, 'bulbasaur': 0, 'pikachu': 3, 'mewtwo': 2, 'charmander': 1} # print(self.name2label)# # self.images, self.labels = self.load_csv('images.csv')# if mode == 'train':# 60% self.images = self.images[:int(0.6*len(self.images))] self.labels = self.labels[:int(0.6*len(self.labels))] elif mode == 'val':# 20% self.images = self.images[int(0.6 * len(self.images)):int(0.8 * len(self.images))] self.labels = self.labels[int(0.6 * len(self.labels)):int(0.8 * len(self.labels))] else:# 20% self.images = self.images[int(0.8 * len(self.images)):] self.labels = self.labels[int(0.8 * len(self.labels)):]# def load_csv(self, filename): if not os.path.exists(os.path.join(self.root, filename)): images = [] for name in self.name2label.keys(): # 'pokemon\\mewtwo\\00001.png images += glob.glob(os.path.join(self.root, name, '*.png')) images += glob.glob(os.path.join(self.root, name, '*.jpg')) images += glob.glob(os.path.join(self.root, name, '*.jpeg')) # 1167, 'pokemon\\bulbasaur\\00000000.png' print(len(images), images) random.shuffle(images) with open(os.path.join(self.root, filename), mode='w', newline='') as f: writer = csv.writer(f) for img in images: # 'pokemon\\bulbasaur\\00000000.png' name = img.split(os.sep)[-2] label = self.name2label[name] # 'pokemon\\bulbasaur\\00000000.png', 0 writer.writerow([img, label]) print('writen into csv file:', filename) # read from csv file images, labels = [], [] with open(os.path.join(self.root, filename)) as f: reader = csv.reader(f) for row in reader: # 'pokemon\\bulbasaur\\00000000.png', 0 img, label = row label = int(label) images.append(img) labels.append(label) assert len(images) == len(labels) return images, labels # def __len__(self): #返 回数字 return len(self.images) def denormalize(self, x_hat): mean = [0.485, 0.456, 0.406] std = [0.229, 0.224, 0.225] # x_hat = (x-mean)/std # x = x_hat*std = mean # x: [c, h, w] # mean: [3] => [3, 1, 1] mean = torch.tensor(mean).unsqueeze(1).unsqueeze(1) std = torch.tensor(std).unsqueeze(1).unsqueeze(1) # print(mean.shape, std.shape) x = x_hat * std + mean return x def __getitem__(self, idx): # idx~[0~len(images)] # self.images, self.labels # img: 'pokemon\\bulbasaur\\00000000.png' # label: 0 img, label = self.images[idx], self.labels[idx] tf = transforms.Compose([ lambda x: Image.open(x).convert('RGB'), # string path= > image data transforms.Resize((int(self.resize * 1.25), int(self.resize * 1.25))), transforms.RandomRotation(15), transforms.CenterCrop(self.resize), transforms.ToTensor(), transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) ]) img = tf(img) label = torch.tensor(label) return img, labeldef main(): import visdom # 开外网 1:pip install visdom 2:sudo python -m visdom.server ✅ import time import torchvision viz = visdom.Visdom() db = Pokemon('pokemon', 224, 'train') x, y = next(iter(db)) print('sample:', x.shape, y.shape, y) viz.image(db.denormalize(x), win='sample_x', opts=dict(title='sample_x')) loader = DataLoader(db, batch_size=32, shuffle=True, num_workers=8) # num_workers=8 多线程 for x, label in loader: viz.images(db.denormalize(x), nrow=8, win='batch', opts=dict(title='batch')) viz.text(str(label.numpy()), win='label', opts=dict(title='batch-label')) time.sleep(10)if __name__ == '__main__': main() ————————pokemon_rapid.py—快速生成自定义数据集文件————————
import torchimport os, globimport random, csvfrom torch.utils.data import Dataset, DataLoader #所有自定义数据集的母类from torchvision import transformsfrom PIL import Imagedef main(): import visdom # 开外网 1:pip install visdom 2:sudo python -m visdom.server ✅ import time import torchvision viz = visdom.Visdom() tf = transforms.Compose([ transforms.Resize((64, 64)), transforms.ToTensor(), ]) db = torchvision.datasets.ImageFolder(root='pokemon', transform=tf) loader = DataLoader(db, batch_size=32, shuffle=True) print(db.class_to_idx) for x, y in loader: print(x) print(x.shape) viz.images(x, nrow=8, win='batch', opts=dict(title='batch')) # win 很重要 它代表 窗口 viz.text(str(y.numpy()), win='label', opts=dict(title='batch-y')) # 也就是说 如果你viz.images&viz.text窗口一样 那就会出现覆盖 time.sleep(10)if __name__ == '__main__': main()
————————resnet.py—构建网络文件————————
import torchfrom torch import nnfrom torch.nn import functional as Fclass ResBlk(nn.Module): """ resnet block """ def __init__(self, ch_in, ch_out, stride=1): """ :param ch_in: :param ch_out: """ super(ResBlk, self).__init__() self.conv1 = nn.Conv2d(ch_in, ch_out, kernel_size=3, stride=stride, padding=1) self.bn1 = nn.BatchNorm2d(ch_out) self.conv2 = nn.Conv2d(ch_out, ch_out, kernel_size=3, stride=1, padding=1) self.bn2 = nn.BatchNorm2d(ch_out) self.extra = nn.Sequential() if ch_out != ch_in: # [b, ch_in, h, w] => [b, ch_out, h, w] self.extra = nn.Sequential( nn.Conv2d(ch_in, ch_out, kernel_size=1, stride=stride), nn.BatchNorm2d(ch_out) ) def forward(self, x): """ :param x: [b, ch, h, w] :return: """ out = F.relu(self.bn1(self.conv1(x))) out = self.bn2(self.conv2(out)) # short cut. # extra module: [b, ch_in, h, w] => [b, ch_out, h, w] # element-wise add: out = self.extra(x) + out out = F.relu(out) return outclass ResNet18(nn.Module): def __init__(self, num_class): super(ResNet18, self).__init__() self.conv1 = nn.Sequential( nn.Conv2d(3, 16, kernel_size=3, stride=3, padding=0), nn.BatchNorm2d(16) ) # followed 4 blocks # [b, 16, h, w] => [b, 32, h ,w] self.blk1 = ResBlk(16, 32, stride=3) # [b, 32, h, w] => [b, 64, h, w] self.blk2 = ResBlk(32, 64, stride=3) # # [b, 64, h, w] => [b, 128, h, w] self.blk3 = ResBlk(64, 128, stride=2) # # [b, 128, h, w] => [b, 256, h, w] self.blk4 = ResBlk(128, 256, stride=2) # [b, 256, 7, 7] self.outlayer = nn.Linear(256*3*3, num_class) def forward(self, x): """ :param x: :return: """ x = F.relu(self.conv1(x)) # [b, 64, h, w] => [b, 1024, h, w] x = self.blk1(x) x = self.blk2(x) x = self.blk3(x) x = self.blk4(x) # print(x.shape) x = x.view(x.size(0), -1) x = self.outlayer(x) return x## def main():# blk = ResBlk(64, 128)# tmp = torch.randn(2, 64, 224, 224)# out = blk(tmp)# print('block:', out.shape)### model = ResNet18(5) # 5类 宠物小精灵# tmp = torch.randn(2, 3, 224, 224)# out = model(tmp)# print('resnet:', out.shape)## p = sum(map(lambda p:p.numel(), model.parameters()))# print('parameters size:', p)### if __name__ == '__main__':# main() ————————train_scratch.py—主文件————————
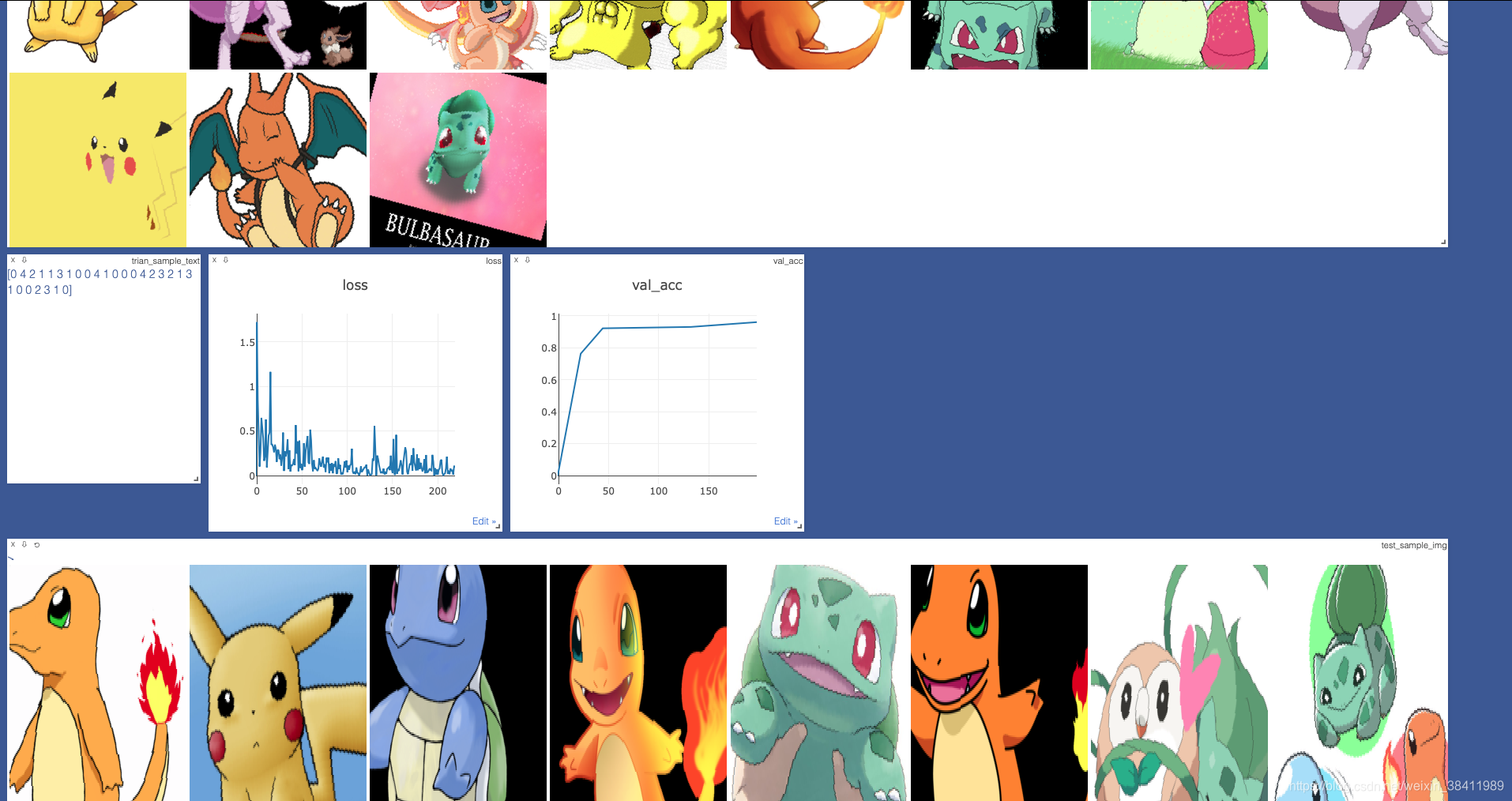
import torchfrom torch import optim, nnimport visdomimport torchvisionimport timefrom pokemon import Pokemonfrom torch.utils.data import DataLoaderfrom resnet import ResNet18batchsz = 32lr = 0.001epochs = 10torch.manual_seed(1234)'''加载数据集'''train_db = Pokemon('pokemon', 224, mode='train')trian_loader = DataLoader(train_db, batch_size=batchsz, shuffle=True, num_workers=4)val_db = Pokemon('pokemon', 224, mode='val')val_loader = DataLoader(val_db, batch_size=batchsz, num_workers=2)test_db = Pokemon('pokemon', 224, mode='test')test_loader = DataLoader(test_db, batch_size=batchsz, num_workers=4)viz = visdom.Visdom() # 创建visdom工具def evaluate(model, loader): # val model.eval() print('----------val 运行----------') correct = 0 total = len(loader.dataset) for x, label in loader: with torch.no_grad(): logits = model(x) pred = logits.argmax(dim=1) correct += torch.eq(pred, label).sum().float().item() return correct / totaldef evaluate_test(model, loader): # val model.eval() print('----------Test visdom显示----------') print() print('NameList --->',test_db.name2label) print() correct = 0 total = len(loader.dataset) for x, label in loader: with torch.no_grad(): logits = model(x) pred = logits.argmax(dim=1) viz.images(test_db.denormalize(x), nrow=8, win='test_sample_img', opts=dict(title='test_sample_img')) viz.text(str(pred.numpy()), win='test_sample_text', opts=dict(title='test_sample_text')) time.sleep(10) correct += torch.eq(pred, label).sum().float().item() print('----------Test visdom显示完毕----------') return correct / totaldef main(): print('----------Train 训练----------') print() print('----------Train visdom显示----------') for x, label in trian_loader: viz.images(train_db.denormalize(x), nrow=8, win='trian_sample_img', opts=dict(title='trian_sample_img')) viz.text(str(label.numpy()), win='trian_sample_text', opts=dict(title='trian_sample_text')) time.sleep(2) print() print('----------Train visdom显示完毕----------') model = ResNet18(5) # 最后分为5类 optimizer = optim.Adam(model.parameters(), lr=lr) criteon = nn.CrossEntropyLoss() best_acc, best_epoch = 0, 0 global_step = 0 viz.line([0], [-1], win='loss', opts=dict(title='loss')) # 对应参数是(y, x)的顺序 viz.line([0], [-1], win='val_acc', opts=dict(title='val_acc')) # 初始化 for epoch in range(epochs): model.train() for step, (x,label) in enumerate(trian_loader): logits = model(x) loss = criteon(logits, label) optimizer.zero_grad() loss.backward() optimizer.step() viz.line([loss.item()], [global_step], win='loss', update='append') # update viz.line 的 win='loss' global_step += 1 if epoch % 1 == 0: val_acc = evaluate(model, val_loader) if val_acc > best_acc: best_epoch = epoch best_acc = val_acc torch.save(model.state_dict(), 'best.mdl') # 保存最好的模型 viz.line([val_acc], [global_step], win='val_acc', update='append') # update viz.line 的 win='val_acc' print() print('best acc', best_acc, 'best_epoch', best_epoch) model.load_state_dict(torch.load('best.mdl')) # print('loaded from ckpt => model.load_state_dict') test_acc = evaluate_test(model, test_loader) print() print('test_acc', test_acc)if __name__ == '__main__': main() 效果展示:
转载地址:https://codingpark.blog.csdn.net/article/details/105400479 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
关于作者
