六轴姿态及roll、pitch和yaw
发布日期:2021-06-30 21:47:01
浏览次数:2
分类:技术文章
本文共 169 字,大约阅读时间需要 1 分钟。

三个角,偏航角(Yaw),横滚角(Roll),俯仰角(Pitch)。
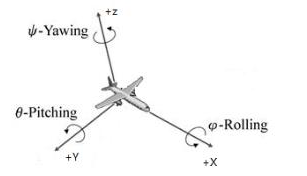
pitch、yaw、roll三个角如下图所示:
(1)翻滚角roll是围绕x轴旋转。
(2)俯仰角pitch是围绕y轴的旋转,可视为飞机的上下俯仰。
(3)偏航角yaw是围绕z轴旋转,可视为控制飞机的偏航。
关于这三个角的解释,更详细的可以查看
在 中有更详细的解释。
转载地址:https://loongembedded.blog.csdn.net/article/details/117554825 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
路过按个爪印,很不错,赞一个!
[***.219.124.196]2024年04月24日 16时46分18秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
let & const(ES6学习笔记)
2019-05-01
解构赋值(ES6学习笔记)
2019-05-01
原始值与引用值(ES6学习笔记)
2019-05-01
python使用HTMLTestRunner查看运行函数
2019-05-01
linux系统安装mysql数据库
2019-05-01
接口自动化判断json()取值问题
2019-05-01
fiddler 抓取手机接口
2019-05-01
fiddler怎么抓取手机https请求
2019-05-01
fiddler 安装以及配置
2019-05-01
python的ImportError
2019-05-01
centos最小化安装配置网络问题
2019-05-01
linux安装java环境[JDK1.8]
2019-05-01
linux下安装jenkins+git+python
2019-05-01
jenkins直接安装插件包
2019-05-01
jenkins添加Git项目时报错Failed to connect to repository : Error performing git command: git ls-remote -h
2019-05-01
CentOS 7系统时间与实际时间差8个小时
2019-05-01
centos7安装python3.7.2
2019-05-01
python文件路径问题怎么在linux与windows中使用
2019-05-01
3性能测试简介(什么是性能测试?为什么进行性能测试,性能指标分析)
2019-05-01
4loadrunner简介
2019-05-01
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311268261 位访客
访问时间: 2024-05-06 03:48:42
访问IP: 18.217.182.45
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版