ARM Linux内核Input输入子系统浅解
发布日期:2021-06-30 21:52:10
浏览次数:2
分类:技术文章
本文共 35943 字,大约阅读时间需要 119 分钟。
--以触摸屏驱动为例
第一章、了解 linux input子系统
L inux输入 设备 总类 繁杂 ,常见 的包括有 按键 、键盘、触摸屏、 鼠标 、摇杆 等等,他们 本身就是 字符设备 , 而 linux内核将 这些 设备 的 共同性抽象出来 , 简化驱动开发 建立 了一个input子系统。 子系统共分为 三层,如图 1所示 。
 |
| 图1 input 输入 子系统 |
驱动 层和 硬件 相关,直接 捕捉和 获取硬件设备 的 数据信息等 (包括 被按下、按下位置、 鼠标移动 、 键盘 按下等等), 然后 将 数据 信息报告到核心层 。核心层负责 连接 驱动层 和 事件处理层 , 设备驱动( device driver ) 和处理程序 ( handler )的 注册需要通过核心层来完成,核心层接收来自驱动层的数据 信息, 并将数据信息选择对应 的 handler去处理,最终handler 将 数据复制到用户 空间。
先了解 三个 定义 在/linux/input.h 下 重要的结构体 input_dev 、input_handler、input_handle。
struct input_dev {
void *private;
const char *name;
const char *phys;
const char *uniq;
struct input_id id; //与 input_handler匹配 用 的 id
unsigned long evbit[NBITS(EV_MAX)]; //设备 支持的 事件 类型
unsigned long keybit[NBITS(KEY_MAX)]; //按键 事件支持的子 事件 类型
unsigned long relbit[NBITS(REL_MAX)];
unsigned long absbit[NBITS(ABS_MAX)]; //绝对坐标 事件支持的子事件类型
unsigned long mscbit[NBITS(MSC_MAX)];
unsigned long ledbit[NBITS(LED_MAX)];
unsigned long sndbit[NBITS(SND_MAX)];
unsigned long ffbit[NBITS(FF_MAX)];
unsigned swbit[NBITS(SW_MAX)];
int ff_effects_max;
unsigned int keycodemax;
unsigned int keycodesize;
void *keycode;
unsigned int repeat_key;
struct timer_list timer;
struct pt_regs *regs;
int state;
int sync;
int abs[ABS_MAX + 1];
int rep[REP_MAX + 1];
unsigned long key[NBITS(KEY_MAX)];
unsigned long led[NBITS(LED_MAX)];
unsigned long snd[NBITS(SND_MAX)];
unsigned sw[NBITS(SW_MAX)];
int absmax[ABS_MAX + 1]; //绝对 坐标 事件 的 最大 键值
int absmin[ABS_MAX + 1]; //绝对 坐标 事件 的最小键值
int absfuzz[ABS_MAX + 1];
int absflat[ABS_MAX + 1];
int (*)(struct input_dev *dev);
void (*close)(struct input_dev *dev);
int (*accept)(struct input_dev *dev, struct file *file);
int (*flush)(struct input_dev *dev, struct file *file);
int (*event)(struct input_dev *dev, unsigned int type, unsigned int code, int value);
int (*upload_effect)(struct input_dev *dev, struct ff_effect *effect);
int (*erase_effect)(struct input_dev *dev, int effect_id);
struct input_handle *grab; //当前 占有该设备的handle
struct mutex mutex; /* serializes and close operations */
unsigned int users; // 打开 该设备的用户量
struct class_device cdev;
struct device *dev; /* will be removed soon */
int dynalloc; /* temporarily */
struct list_head h_list; // 该 链表头用于 链接该 设备 所关联 的input_handle
struct list_head node; // 该 链表头用于 将 设备 链接到input_dev_list
};
Input_dev 是 一个很强大的结构体, 它 把所有的 input 设备 (触摸屏 、键盘、鼠标等 )的 信息都考虑到了, 对于 来说只用到 它 里面的 一部分 而已, 尤其 是 加粗 的部分 ,注意 该结构体中 最后 两行定义的 两个 list_head 结构体 , list_head 在/linux/list.h 中 有定义,深入跟踪
struct list_head {
struct list_head *, *prev;
};
该 结构体内部 并 没有 定义 数据而 只 定义了两个指向本身 结构体 的指针 ,预先说明 一下, 所有 的 input device 在注册后 会 加入一个input_dev_list( 输入 设备链表) , 所有的e vent handler在注册后会加入一个input_handler_list( 输入 处理程序链表) ,这里 的list_ 主要 的 作用 是作为 input_dev_list 和input_handler_list 的 一个节点来保存地址。I nput_dev_list 和input_handler_list之间的对应关系由input_handle结构体桥接,具体后面说明。
struct input_handler {
void *private;
void (*event)(struct input_handle *handle, unsigned int type, unsigned int code, int value);
struct input_handle* (*connect)(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id);
void (*disconnect)(struct input_handle *handle);
const struct file_operations *fops; // 提供给 用户对设备 操作 的函数指针
int minor;
char *name;
struct input_device_id *id_table; //与 input_dev匹配 用 的 id
struct input_device_id *blacklist; // 标记 的黑名单
struct list_head h_list; //用于 链接和该 handler相关 的 handle
struct list_head node; // 用于 将该 handler链入 input_handler_list
};
i nput_handler顾名思义, 它是用来处理 input_dev的 一个结构体, 相关 的处理在结构里内部都有定义, 最后 两行定义的list_结构体作用 同 input_dev所定义的一样,这里不再说明。
注 :input_device_id 结构体 在 / linux/mod_devicetable.h 中 有定义
struct input_handle {
void *private;
int ; // 记录 设备打开次数
char *name;
struct input_dev *dev; // 指向 所属的input_dev
struct input_handler *handler; // 指向所属的 input_handler
struct list_head d_node; //用于 链入 所 指向的 input_dev的handle 链表
struct list_head h_node; //用于 链入 所 指向的 input_ handler 的handle 链表
};
可以 看到input_handle中拥有指向input_dev和input_handler的指针, 即 input_handle是用来关联 input_dev 和input_handler 。为什么 用input_handle来关联input_dev和input_handler 而 不 将 input_dev和input_handler直接对应呢?因为 一个 device 可以 对应多个 handler , 而 一个handler也可处理多个 device。就 如一个 设备可以 对应 event handler 也 可以对应tseve handler 。
input_dev 、input_ handler 、input_handle 的关系如下图 2所示 。
 |
| 图2 input_dev,input_handler,input_handle关系图 |
第二章、input device 的 注册
I nput device 的注册 实际上 仅仅 只有几行代码,因为在input.c中已经将大量的代码封装好了,主需要调用几个关键的函数就能完成对input device的注册。
在 xxx_ts.c中预先 定义 全局变量struct input_dev tsdev ;然后 进入到初始化
static int __init xxx_probe(struct platform_device *pdev)
{
…
if (!(tsdev = input_allocate_device()))
{
printk(KERN_ERR "tsdev: not enough memory\n");
err = -ENOMEM;
goto fail;
}
…
tsdev->name = "xxx TouchScreen"; //xxx 为 芯片型号
tsdev ->phys = "xxx/event0";
tsdev ->id.bustype = BUS_HOST; //设备 id,用于匹配handler的id
tsdev ->id.vendor = 0x0005;
tsdev ->id.product = 0x0001;
tsdev ->id.version = 0x0100;
tsdev -> = xxx_open;
tsdev ->close =xxx_close;
tsdev ->evbit[0] = BIT(EV_KEY) | BIT(EV_ABS) | BIT(EV_SYN); // 设置 支持的 事件 类型
tsdev ->keybit[LONG(BTN_TOUCH)] = BIT(BTN_TOUCH);
input_set_abs_params ( tsdev, ABS_X, 0, 0x400, 0, 0); // 限定 绝对坐标X的取值范围
input_set_abs_params(tsdev, ABS_Y, 0, 0x400, 0, 0); // 同上
input_set_abs_params(tsdev, ABS_PRESSURE, 0, 1000, 0, 0); // 压力 值 范围
…
If(input_register_device(tsdev) == error) //注册 设备
goto fail;
…
fail:
input_free_device(tsdev);
printk(“ts probe failed\n”);
return err;
}
先看 该函数中的tsdev = input_allocate_device() , 深入最终,该在input.c中有定义
struct input_dev *input_allocate_device(void)
{
struct input_dev *dev;
dev = kzalloc(sizeof(struct input_dev), GFP_KERNEL);
if (dev) {
dev->dynalloc = 1;
dev->cdev.class = &input_class;
class_device_initialize(&dev->cdev);
INIT_LIST_HEAD(&dev->h_list);
INIT_LIST_HEAD(&dev->node);
}
return dev;
}
学过 C语言应该都知道malloc函数 (开辟 内存 空间) , 而 这里的kzalloc也 类似 于C语言中的malloc一样,是linux内核 空间 分配内存函数, 后面 的GFP_KERNEL 标志意为常规 的内存分配,更多的分配标志 可 参阅先关资料 (我 也不懂 )。再 回到前面的函数中来,接着后面的代码为对tsdev结构体中的成员进行 赋值初始化 ,赋值完成后就要开始进入主题: 注册 设备了 , 进入到函数input_register_device(tsdev) , 该在input.c中有定义。
int input_register_device(struct input_dev *dev)
{
static atomic_t input_no = ATOMIC_INIT(0); // 定义 原子变量, 禁止线程 并发访问
struct input_handle *handle; // 定义 一些变量 备 后文使用
struct input_handler *handler;
struct input_device_id *id;
const char *path;
int error;
if (!dev->dynalloc) {
printk(KERN_WARNING "input: device %s is statically allocated, will not register\n"
"Please convert to input_allocate_device() or contact \n",
dev->name ? dev->name : "<Unknown>");
return -EINVAL;
}
mutex_init(&dev->mutex); // 互斥锁 初始化, 防止 临界区代码 被并发访问
set_bit(EV_SYN, dev->evbit); // 设置 支持同步事件,input设备 全部 默认支持同步事件
/*
* If delay and period are pre-set by the driver, then autorepeating
* is handled by the driver itself and we don't do it in input.c.
*/
init_timer(&dev->timer);
if (!dev->rep[REP_DELAY] && !dev->rep[REP_PERIOD]) {
dev->timer.data = (long) dev;
dev->timer.function = input_repeat_key;
dev->rep[REP_DELAY] = 250;
dev->rep[REP_PERIOD] = 33;
}
INIT_LIST_HEAD(&dev->h_list); // 初始化需要关联 的handle链表头
list_add_tail(&dev->node, &input_dev_list); // 将 设备添加到input_dev_list中
dev->cdev.class = &input_class;
snprintf(dev->cdev.class_id, sizeof(dev->cdev.class_id),
"input%ld", (unsigned ) atomic_inc_return(&input_no) - 1);
error = class_device_add(&dev->cdev);
if (error)
return error;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_attr_group);
if (error)
goto fail1;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_id_attr_group);
if (error)
goto fail2;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_caps_attr_group);
if (error)
goto fail3;
__module_get(THIS_MODULE);
path = kobject_get_path(&dev->cdev.kobj, GFP_KERNEL);
printk(KERN_INFO "input: %s as %s\n",
dev->name ? dev->name : "Unspecified device", path ? path : "N/A");
kfree(path);
/* ** 遍历input_handler_list 上 全部 的handler,寻找与该设备匹配的handler ***/
list_for_each_entry(handler, &input_handler_list, node)
if (!handler->blacklist || !input_match_device(handler->blacklist, dev))
if ((id = input_match_device(handler->id_table, dev)))
if ((handle = handler->connect(handler, dev, id)))
input_link_handle(handle);
input_wakeup_procfs_readers();
return 0;
fail3: sysfs_remove_group(&dev->cdev.kobj, &input_dev_id_attr_group);
fail2: sysfs_remove_group(&dev->cdev.kobj, &input_dev_attr_group);
fail1: class_device_del(&dev->cdev);
return error;
}
先看 中前面代码加粗的部分 mutex_init(&dev->mutex) , 与互斥锁相关的东西 (我也 不太懂 ), set_bit(EV_SYN, dev->evbit) 设置 支持同步事件,linux的input子系统默认要支持同步事件 。
接着看 中间代码加粗的部分, 有关 list操作 的 在/linux/list.h 中 有定义
static inline void INIT_LIST_HEAD(struct list_head *list)
{
list->next = list;
list->prev = list;
}
static inline void list_add_tail(struct list_head *new, struct list_head *head)
{
__list_add(new, ->prev, head);
}
static inline void __list_add(struct list_head *new,
struct list_head *prev,
struct list_head *next)
{
next->prev = new;
new->next = next;
new->prev = prev;
prev-> = new;
}
可以 看得出INIT_LIST_HEAD(struct list_head *list) 就是让 list指向结构体的成员再指向其本身完成初始化操作,list_add_tail(struct list_head *new, struct list_head *head) 是 将new 所 指向的 结构体 作为一 节点 插入到所指向链表节点之前。 因此 中的 list_add_tail(&dev->node, &input_dev_list) 就是将该 设备 添加 到 input_dev_list 中。 而 input_dev_list这个双向链表在什么时候被定义了呢,且看input.c源代码开始部分 全局 部分有定义:
static LIST_HEAD(input_dev_list);
static LIST_HEAD(input_handler_list);
而 LIST_HEAD的宏定义:
#define LIST_HEAD_INIT(name) { &(name), &(name) }
#define LIST_HEAD(name) \
struct list_head name = LIST_HEAD_INIT(name)
显然 这在最开始就已经定义了input_dev_list和input_handler_list 这 两个链表, 且这 两个链表都只有一个节点, 而 在 device 和handler注册的时候会在这两条链表中加入节点, list_add_tail(&dev->node, &input_dev_list) 就是将该 设备 添加 到 input_dev_list 中 。
注意 最后代码加粗的部分,该部分完成了input_dev和input_handler的桥接。先看 list_for_each_entry(handler, &input_handler_list, node) , list_for_each_entry 在 list.h中有定义, 其 作用相当于一个for循环。其 约 等价于:( 个人 理解)
for(handler = input_handler_list 表头所属 的 input_ handler 结构体 地址;
handler != input_handler_list 表尾所属 的 input_ handler 结构体 地址 ;
handler++)
即 handler第一次 指向 input_handler_list 的 头部 所在 的input_handler地址。每循环一次handler就沿着input_handler_list移动到下一个节点,得到下一节点 所属 的handler地址,直到 input_handler_list 的结尾。 而每次 的循环需要做什么 呢 ? 要 做的就是 input_handler_list上的每一个handler,看有 哪些 handler能与该设备匹配的上 。匹配过程 :
if (!handler->blacklist || !input_match_device(handler->blacklist, dev)) //判断 该handler没有被列入黑名单或者 黑名单匹配不成功 的话则 继续
if ((id = input_match_device(handler->id_table, dev))) // 将 设备id与handler的id进行匹配,成功则继续往下
if ((handle = handler->connect(handler, dev, id))) // 链接 device与handler , 成功则继续往下
input_link_handle(handle); //将 handle链入input_handler_list和input_dev_list
继续 跟踪进这些函数
static struct input_device_id *input_match_device(struct input_device_id *id, struct input_dev *dev)
{
int i;
for (; id->flags || id->driver_info; id++) {
if (id->flags & INPUT_DEVICE_ID_MATCH_BUS) // 匹配 handler和device id 的 flag标志位
if (id->bustype != dev->id.bustype)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VENDOR)
if (id->vendor != dev->id.vendor)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_PRODUCT)
if (id->product != dev->id.product)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VERSION)
if (id->version != dev->id.version)
continue;
MATCH_BIT(evbit, EV_MAX); // 匹配 id 相关 标志位
MATCH_BIT(keybit, KEY_MAX);
MATCH_BIT(relbit, REL_MAX);
MATCH_BIT(absbit, ABS_MAX);
MATCH_BIT(mscbit, MSC_MAX);
MATCH_BIT(ledbit, LED_MAX);
MATCH_BIT(sndbit, SND_MAX);
MATCH_BIT(ffbit, FF_MAX);
MATCH_BIT(swbit, SW_MAX);
return id;
}
return NULL;
}
该 用于匹配input_dev 结构体 和input_handler 结构 体里面 定义 的input_device_id, 若 两者里面 有 任何 相关 变量不一样则匹配失败 (条件 真苛刻 )。
再看 handle = handler->connect(handler, dev, id) , connect函数即为static struct input_handle *evdev_connect(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id) , 为什么呢会是这个呢,我们先看 evdev.c中 的input_handler结构体定义 :
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
可 只 这里 input_handler 结构体 里边的connect即为evdev_connect函数
static struct input_handle *evdev_connect(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id)
{
1 struct evdev *evdev; //定义 一个evdev结构体指针
struct class_device *cdev;
int minor;
2 for (minor = 0; minor < EVDEV_MINORS && evdev_table[minor]; minor++);
if (minor == EVDEV_MINORS) {
printk(KERN_ERR "evdev: no more free evdev devices\n");
return NULL;
}
3 if (!(evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL)))
return NULL;
INIT_LIST_HEAD(&evdev->list);
init_waitqueue_(&evdev->wait);
evdev->exist = 1;
evdev->minor = minor;
evdev->handle.dev = dev;
evdev->handle.name = evdev->name;
evdev->handle.handler = handler;
evdev->handle.private = evdev;
sprintf(evdev->name, "event%d", minor);
evdev_table[minor] = evdev;
cdev = class_device_create(&input_class, &dev->cdev,
MKDEV(INPUT_MAJOR, EVDEV_MINOR_BASE + minor),
dev->cdev.dev, evdev->name);
/* temporary symlink to keep userspace happy */
sysfs_create_link(&input_class.subsys.kset.kobj, &cdev->kobj,
evdev->name);
return &evdev->handle;
}
先 看 1处 ,这里有个定义在evdev.c里边的新面孔
struct evdev {
int exist;
int ;
int minor;
char name[16];
struct input_handle handle; // 关联 input_handler和input_dev的input_handle
wait_queue_head_t wait;
struct evdev_list *grab;
struct list_ list;
};
evdev 这个 结构体就是 拿来应用 开发操作的 ,在 这里就是 对应 的设备文件实体, 结构体 前边定义了记录设备的一些信息 (设备号 ,打开状态、设备名字等 ), 这里还定义了一个input_handle的实体handle,没错这个handle就是要用来 关联 input_dev和input_handler的 , 后面还有一 行 加粗的部分后面再做介绍。
再 看 2处 , evdev_table [] 是 一个全局变量的数组 , 在evdev.c中有定义
#define EVDEV_MINORS 32
static struct evdev *evdev_table[EVDEV_MINORS];
在 前面 已经 说明了, 一个 device 可以 对应多个 handler , 而 一个handler也可处理多个 device, 这里体现 出了 后者 。既然 evdev这个结构体是 对应 的设备文件实体, 因为这个 handler可能会处理多个device,因此 该 handler要处理 n 个device就会应该有 n 个 evdev 实体,而这些实体的地址存放在evdev_table[] 这个指针 数组中,也就是说该handler最多只能处理EVDEV_MINORS 个 device , 而 2处 的这几句代码就是要evdev_table[] 这个 数组 看 还有没有 空着 的位置,有 的 话才会继续 进行 下面的程序。
再 看 3处 ,开辟 一个evdev结构体的内存空间,前面有说明过kzalloc 函数 ,这里不再说明。
后面 的代码就是为 evdev 结构体变量赋 初始值 了, 其中 init_waitqueue_(&evdev->wait) 初始化 等待队列,具体介绍 结合/linux/wait.h和查看 相关资料 (本人 不懂 )。
函数 最后 得到 evdev结构体内的hanlde地址并返回, 此时返回到 我们的int input_register_device(struct input_dev *dev) 函数 里面,最后 一句
input_link_handle(handle) ,进入 到该函数中发现
static void input_link_handle(struct input_handle *handle)
{
list_add_tail(&handle->d_node, &handle->dev->h_list);
list_add_tail(&handle->h_node, &handle->handler->h_list);
}
在 该中也 只是 将handle中的d_node和h_node 分别 接入到input_dev和input_handler的h_list中 , 此时input_dev、input_handler、input_handle 三者 形成了如图 2所示 的关系。
至此 设备注册 过程 算是全部完成了,但是 貌似 还有点乱 。 在 整个 设备的注册过程中函数的 嵌套一个 接着一个, 不仅 函数嵌套,结构体也使用了结构体和函数嵌套等,在 各个 函数内也用了大量的结构体指针等等 。 但 是 在整个 过程中 input_dev、input_handler、input_handle 这 三个结构体变量的实体也 都 只有一个。其中 input_dev 结构体实体在xxx_ts.c中直接定义了一个 input_dev 的 指针 全局变量 :
struct input_dev *tsdev;
并 在初始化 函数 中 开辟 了一个input_dev的内存空间并让tsdev指针指向它:
w55fa95_dev = input_allocate_device() ;
input_handler结构体 在evdev.c中也直接被定义了 并 初始化了
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
而 关联input_dev和input_handler的input_handle则是在调用 链接连接 函数static struct input_handle *evdev_connect(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id) 的 时候,在该函数的内部 调用 evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL) 开辟 了一个evdev结构体的内存空间 时 创建了 , input_handle就是使用了evdev结构体内部定义的input_handle 。
一个完整input设备系统不仅要有设备,还需要有处理程序input_handler, 而 上文中 主要 介绍的是设备注册、生成 、 以及和handler搭配的一个过程,而handler在 何时生成 的 ?
第三章 、input_handler 的 注册。
Input_handler是要和用户层打交道的 , 在evdev.c中直接定义了一个input_handler结构体并初始化了一些内部成员变量。
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops, // 用户 对设备操作的函数指针
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids, // 指向 一个evedev的指针数组
};
先看 第一 行 加粗的代码,evedev_fops结构体的定义 如下
static struct file_operations evdev_fops = {
.owner = THIS_MODULE,
.read = evdev_read,
.write = evdev_write,
.poll = evdev_poll,
.open = evdev_open,
.release = evdev_release,
.unlocked_ioctl = evdev_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = evdev_ioctl_compat,
#endif
.fasync = evdev_fasync,
.flush = evdev_flush
};
相信 做过 linux 设备驱动编程的对这 都很熟悉 了,就是一大堆的用户接口函数,包括对设备的 、close、read、write、ioctl等。
再 看第二行代码加粗的部分 .id_table = evdev_ids, id.table 就是 前面所说过要和input_dev的id匹配的这么一个结构体,这里让它初始化为evdev_ids,在看evdev_ids的定义 :
static struct input_device_id evdev_ids[] = {
{ .driver_info = 1 }, /* Matches all devices */
{ }, /* Terminating zero entry */
};
MODULE_DEVICE_TABLE(input, evdev_ids);
这里是 一个结构体数组, 令 数组中 第一个 结构体的该成员变量driver_info的值为 1, 其他成员变量均 未 定义,说明 这个 handler对 所有 device的id都能匹配得上 。数组 中的第二个结构体为空 表示 结束 ,用来 标识结束配合下面的MODULE_DEVICE_TABLE(input, evdev_ids) 使用 ,关于MODULE_DEVICE_TABLE 宏定义 介绍自行查看 相关 文献 (我也 不懂 )。
接下来 进入正题,input_handler的注册 !
Input_handler的注册和input_dev的注册很相似,大同小异罢了,在evdev.c源码中 显示 定义并初始化了一个input_handler结构体并直接给相关的 成员 变量赋值了,就是本章开始所将的部分,然后再初始化中注册一个input_handler:
static int __init evdev_init(void)
{
input_register_handler(&evdev_handler);
return 0;
}
这里 只调用了一个input_register_handler() 函数, 看起来应该是很简单的样子 (相比 input_dev的注册 ),继续 跟踪进入到该函数中:
void input_register_handler(struct input_handler *handler)
{
struct input_dev *dev;
struct input_handle *handle;
struct input_device_id *id;
if (!handler) return;
INIT_LIST_HEAD(&handler->h_list);
if (handler->fops != NULL)
input_table[handler->minor >> 5] = handler;
list_add_tail(&handler->node, &input_handler_list);
list_for_each_entry(dev, &input_dev_list, node)
if (!handler->blacklist || !input_match_device(handler->blacklist, dev))
if ((id = input_match_device(handler->id_table, dev)))
if ((handle = handler->connect(handler, dev, id)))
input_link_handle(handle);
input_wakeup_procfs_readers();
}
该函数 中代码加粗的部分,与input_register_device() 里的如出一辙,这里不再做说明。
至此input_handler 的注册已经 结束 。
第四章 、input 子系统数据 结构
下 图 3是以 触摸屏设备为例子的input子系统 数据 结构图。
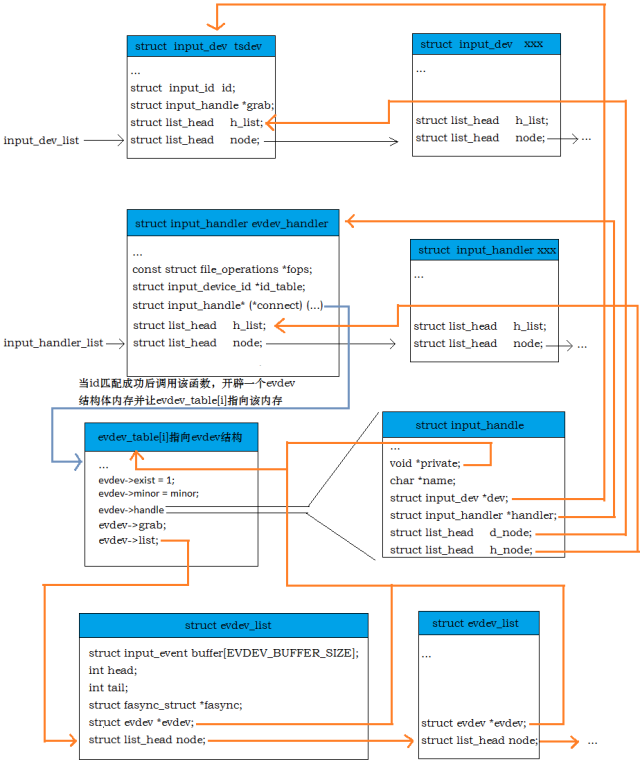 |
| 图3 input子系统数据结构图 |
进行 到这里,又多冒出来了一个struct evdev_list的结构体, 这 在之前并没有提到过,因为在注册input_dev和input_handler过程中并没有用到过, 查看 该结构体:
struct evdev_list {
struct input_event buffer[EVDEV_BUFFER_SIZE]; // 存放 设备数据信息
int head; // buffer 的 下标 ,标识从设备中过来 要 存放到buffer的 数据 的位置
int tail; //buffer的下标,标识用户读取
- - 以 触摸屏驱动为例
第一章、了解 linux input子系统
L inux输入 设备 总类 繁杂 ,常见 的包括有 按键 、键盘、触摸屏、 鼠标 、摇杆 等等,他们 本身就是 字符设备 , 而 linux内核将 这些 设备 的 共同性抽象出来 , 简化驱动开发 建立 了一个input子系统。 子系统共分为 三层,如图 1所示 。
|
| 图1 input 输入 子系统 |
驱动 层和 硬件 相关,直接 捕捉和 获取硬件设备 的 数据信息等 (包括 被按下、按下位置、 鼠标移动 、 键盘 按下等等), 然后 将 数据 信息报告到核心层 。核心层负责 连接 驱动层 和 事件处理层 , 设备驱动( device driver ) 和处理程序 ( handler )的 注册需要通过核心层来完成,核心层接收来自驱动层的数据 信息, 并将数据信息选择对应 的 handler去处理,最终handler 将 数据复制到用户 空间。
先了解 三个 定义 在/linux/input.h 下 重要的结构体 input_dev 、input_handler、input_handle。
struct input_dev {
void *private;
const char *name;
const char *phys;
const char *uniq;
struct input_id id; //与 input_handler匹配 用 的 id
unsigned long evbit[NBITS(EV_MAX)]; //设备 支持的 事件 类型
unsigned long keybit[NBITS(KEY_MAX)]; //按键 事件支持的子 事件 类型
unsigned long relbit[NBITS(REL_MAX)];
unsigned long absbit[NBITS(ABS_MAX)]; //绝对坐标 事件支持的子事件类型
unsigned long mscbit[NBITS(MSC_MAX)];
unsigned long ledbit[NBITS(LED_MAX)];
unsigned long sndbit[NBITS(SND_MAX)];
unsigned long ffbit[NBITS(FF_MAX)];
unsigned swbit[NBITS(SW_MAX)];
int ff_effects_max;
unsigned int keycodemax;
unsigned int keycodesize;
void *keycode;
unsigned int repeat_key;
struct timer_list timer;
struct pt_regs *regs;
int state;
int sync;
int abs[ABS_MAX + 1];
int rep[REP_MAX + 1];
unsigned long key[NBITS(KEY_MAX)];
unsigned long led[NBITS(LED_MAX)];
unsigned long snd[NBITS(SND_MAX)];
unsigned sw[NBITS(SW_MAX)];
int absmax[ABS_MAX + 1]; //绝对 坐标 事件 的 最大 键值
int absmin[ABS_MAX + 1]; //绝对 坐标 事件 的最小键值
int absfuzz[ABS_MAX + 1];
int absflat[ABS_MAX + 1];
int (*)(struct input_dev *dev);
void (*close)(struct input_dev *dev);
int (*accept)(struct input_dev *dev, struct file *file);
int (*flush)(struct input_dev *dev, struct file *file);
int (*event)(struct input_dev *dev, unsigned int type, unsigned int code, int value);
int (*upload_effect)(struct input_dev *dev, struct ff_effect *effect);
int (*erase_effect)(struct input_dev *dev, int effect_id);
struct input_handle *grab; //当前 占有该设备的handle
struct mutex mutex; /* serializes and close operations */
unsigned int users; // 打开 该设备的用户量
struct class_device cdev;
struct device *dev; /* will be removed soon */
int dynalloc; /* temporarily */
struct list_head h_list; // 该 链表头用于 链接该 设备 所关联 的input_handle
struct list_head node; // 该 链表头用于 将 设备 链接到input_dev_list
};
Input_dev 是 一个很强大的结构体, 它 把所有的 input 设备 (触摸屏 、键盘、鼠标等 )的 信息都考虑到了, 对于 来说只用到 它 里面的 一部分 而已, 尤其 是 加粗 的部分 ,注意 该结构体中 最后 两行定义的 两个 list_head 结构体 , list_head 在/linux/list.h 中 有定义,深入跟踪
struct list_head {
struct list_head *, *prev;
};
该 结构体内部 并 没有 定义 数据而 只 定义了两个指向本身 结构体 的指针 ,预先说明 一下, 所有 的 input device 在注册后 会 加入一个input_dev_list( 输入 设备链表) , 所有的e vent handler在注册后会加入一个input_handler_list( 输入 处理程序链表) ,这里 的list_ 主要 的 作用 是作为 input_dev_list 和input_handler_list 的 一个节点来保存地址。I nput_dev_list 和input_handler_list之间的对应关系由input_handle结构体桥接,具体后面说明。
struct input_handler {
void *private;
void (*event)(struct input_handle *handle, unsigned int type, unsigned int code, int value);
struct input_handle* (*connect)(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id);
void (*disconnect)(struct input_handle *handle);
const struct file_operations *fops; // 提供给 用户对设备 操作 的函数指针
int minor;
char *name;
struct input_device_id *id_table; //与 input_dev匹配 用 的 id
struct input_device_id *blacklist; // 标记 的黑名单
struct list_head h_list; //用于 链接和该 handler相关 的 handle
struct list_head node; // 用于 将该 handler链入 input_handler_list
};
i nput_handler顾名思义, 它是用来处理 input_dev的 一个结构体, 相关 的处理在结构里内部都有定义, 最后 两行定义的list_结构体作用 同 input_dev所定义的一样,这里不再说明。
注 :input_device_id 结构体 在 / linux/mod_devicetable.h 中 有定义
struct input_handle {
void *private;
int ; // 记录 设备打开次数
char *name;
struct input_dev *dev; // 指向 所属的input_dev
struct input_handler *handler; // 指向所属的 input_handler
struct list_head d_node; //用于 链入 所 指向的 input_dev的handle 链表
struct list_head h_node; //用于 链入 所 指向的 input_ handler 的handle 链表
};
可以 看到input_handle中拥有指向input_dev和input_handler的指针, 即 input_handle是用来关联 input_dev 和input_handler 。为什么 用input_handle来关联input_dev和input_handler 而 不 将 input_dev和input_handler直接对应呢?因为 一个 device 可以 对应多个 handler , 而 一个handler也可处理多个 device。就 如一个 设备可以 对应 event handler 也 可以对应tseve handler 。
input_dev 、input_ handler 、input_handle 的关系如下图 2所示 。
|
| 图2 input_dev,input_handler,input_handle关系图 |
第二章、input device 的 注册
I nput device 的注册 实际上 仅仅 只有几行代码,因为在input.c中已经将大量的代码封装好了,主需要调用几个关键的函数就能完成对input device的注册。
在 xxx_ts.c中预先 定义 全局变量struct input_dev tsdev ;然后 进入到初始化
static int __init xxx_probe(struct platform_device *pdev)
{
…
if (!(tsdev = input_allocate_device()))
{
printk(KERN_ERR "tsdev: not enough memory\n");
err = -ENOMEM;
goto fail;
}
…
tsdev->name = "xxx TouchScreen"; //xxx 为 芯片型号
tsdev ->phys = "xxx/event0";
tsdev ->id.bustype = BUS_HOST; //设备 id,用于匹配handler的id
tsdev ->id.vendor = 0x0005;
tsdev ->id.product = 0x0001;
tsdev ->id.version = 0x0100;
tsdev -> = xxx_open;
tsdev ->close =xxx_close;
tsdev ->evbit[0] = BIT(EV_KEY) | BIT(EV_ABS) | BIT(EV_SYN); // 设置 支持的 事件 类型
tsdev ->keybit[LONG(BTN_TOUCH)] = BIT(BTN_TOUCH);
input_set_abs_params ( tsdev, ABS_X, 0, 0x400, 0, 0); // 限定 绝对坐标X的取值范围
input_set_abs_params(tsdev, ABS_Y, 0, 0x400, 0, 0); // 同上
input_set_abs_params(tsdev, ABS_PRESSURE, 0, 1000, 0, 0); // 压力 值 范围
…
If(input_register_device(tsdev) == error) //注册 设备
goto fail;
…
fail:
input_free_device(tsdev);
printk(“ts probe failed\n”);
return err;
}
先看 该函数中的tsdev = input_allocate_device() , 深入最终,该在input.c中有定义
struct input_dev *input_allocate_device(void)
{
struct input_dev *dev;
dev = kzalloc(sizeof(struct input_dev), GFP_KERNEL);
if (dev) {
dev->dynalloc = 1;
dev->cdev.class = &input_class;
class_device_initialize(&dev->cdev);
INIT_LIST_HEAD(&dev->h_list);
INIT_LIST_HEAD(&dev->node);
}
return dev;
}
学过 C语言应该都知道malloc函数 (开辟 内存 空间) , 而 这里的kzalloc也 类似 于C语言中的malloc一样,是linux内核 空间 分配内存函数, 后面 的GFP_KERNEL 标志意为常规 的内存分配,更多的分配标志 可 参阅先关资料 (我 也不懂 )。再 回到前面的函数中来,接着后面的代码为对tsdev结构体中的成员进行 赋值初始化 ,赋值完成后就要开始进入主题: 注册 设备了 , 进入到函数input_register_device(tsdev) , 该在input.c中有定义。
int input_register_device(struct input_dev *dev)
{
static atomic_t input_no = ATOMIC_INIT(0); // 定义 原子变量, 禁止线程 并发访问
struct input_handle *handle; // 定义 一些变量 备 后文使用
struct input_handler *handler;
struct input_device_id *id;
const char *path;
int error;
if (!dev->dynalloc) {
printk(KERN_WARNING "input: device %s is statically allocated, will not register\n"
"Please convert to input_allocate_device() or contact \n",
dev->name ? dev->name : "<Unknown>");
return -EINVAL;
}
mutex_init(&dev->mutex); // 互斥锁 初始化, 防止 临界区代码 被并发访问
set_bit(EV_SYN, dev->evbit); // 设置 支持同步事件,input设备 全部 默认支持同步事件
/*
* If delay and period are pre-set by the driver, then autorepeating
* is handled by the driver itself and we don't do it in input.c.
*/
init_timer(&dev->timer);
if (!dev->rep[REP_DELAY] && !dev->rep[REP_PERIOD]) {
dev->timer.data = (long) dev;
dev->timer.function = input_repeat_key;
dev->rep[REP_DELAY] = 250;
dev->rep[REP_PERIOD] = 33;
}
INIT_LIST_HEAD(&dev->h_list); // 初始化需要关联 的handle链表头
list_add_tail(&dev->node, &input_dev_list); // 将 设备添加到input_dev_list中
dev->cdev.class = &input_class;
snprintf(dev->cdev.class_id, sizeof(dev->cdev.class_id),
"input%ld", (unsigned ) atomic_inc_return(&input_no) - 1);
error = class_device_add(&dev->cdev);
if (error)
return error;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_attr_group);
if (error)
goto fail1;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_id_attr_group);
if (error)
goto fail2;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_caps_attr_group);
if (error)
goto fail3;
__module_get(THIS_MODULE);
path = kobject_get_path(&dev->cdev.kobj, GFP_KERNEL);
printk(KERN_INFO "input: %s as %s\n",
dev->name ? dev->name : "Unspecified device", path ? path : "N/A");
kfree(path);
/* ** 遍历input_handler_list 上 全部 的handler,寻找与该设备匹配的handler ***/
list_for_each_entry(handler, &input_handler_list, node)
if (!handler->blacklist || !input_match_device(handler->blacklist, dev))
if ((id = input_match_device(handler->id_table, dev)))
if ((handle = handler->connect(handler, dev, id)))
input_link_handle(handle);
input_wakeup_procfs_readers();
return 0;
fail3: sysfs_remove_group(&dev->cdev.kobj, &input_dev_id_attr_group);
fail2: sysfs_remove_group(&dev->cdev.kobj, &input_dev_attr_group);
fail1: class_device_del(&dev->cdev);
return error;
}
先看 中前面代码加粗的部分 mutex_init(&dev->mutex) , 与互斥锁相关的东西 (我也 不太懂 ), set_bit(EV_SYN, dev->evbit) 设置 支持同步事件,linux的input子系统默认要支持同步事件 。
接着看 中间代码加粗的部分, 有关 list操作 的 在/linux/list.h 中 有定义
static inline void INIT_LIST_HEAD(struct list_head *list)
{
list->next = list;
list->prev = list;
}
static inline void list_add_tail(struct list_head *new, struct list_head *head)
{
__list_add(new, ->prev, head);
}
static inline void __list_add(struct list_head *new,
struct list_head *prev,
struct list_head *next)
{
next->prev = new;
new->next = next;
new->prev = prev;
prev-> = new;
}
可以 看得出INIT_LIST_HEAD(struct list_head *list) 就是让 list指向结构体的成员再指向其本身完成初始化操作,list_add_tail(struct list_head *new, struct list_head *head) 是 将new 所 指向的 结构体 作为一 节点 插入到所指向链表节点之前。 因此 中的 list_add_tail(&dev->node, &input_dev_list) 就是将该 设备 添加 到 input_dev_list 中。 而 input_dev_list这个双向链表在什么时候被定义了呢,且看input.c源代码开始部分 全局 部分有定义:
static LIST_HEAD(input_dev_list);
static LIST_HEAD(input_handler_list);
而 LIST_HEAD的宏定义:
#define LIST_HEAD_INIT(name) { &(name), &(name) }
#define LIST_HEAD(name) \
struct list_head name = LIST_HEAD_INIT(name)
显然 这在最开始就已经定义了input_dev_list和input_handler_list 这 两个链表, 且这 两个链表都只有一个节点, 而 在 device 和handler注册的时候会在这两条链表中加入节点, list_add_tail(&dev->node, &input_dev_list) 就是将该 设备 添加 到 input_dev_list 中 。
注意 最后代码加粗的部分,该部分完成了input_dev和input_handler的桥接。先看 list_for_each_entry(handler, &input_handler_list, node) , list_for_each_entry 在 list.h中有定义, 其 作用相当于一个for循环。其 约 等价于:( 个人 理解)
for(handler = input_handler_list 表头所属 的 input_ handler 结构体 地址;
handler != input_handler_list 表尾所属 的 input_ handler 结构体 地址 ;
handler++)
即 handler第一次 指向 input_handler_list 的 头部 所在 的input_handler地址。每循环一次handler就沿着input_handler_list移动到下一个节点,得到下一节点 所属 的handler地址,直到 input_handler_list 的结尾。 而每次 的循环需要做什么 呢 ? 要 做的就是 input_handler_list上的每一个handler,看有 哪些 handler能与该设备匹配的上 。匹配过程 :
if (!handler->blacklist || !input_match_device(handler->blacklist, dev)) //判断 该handler没有被列入黑名单或者 黑名单匹配不成功 的话则 继续
if ((id = input_match_device(handler->id_table, dev))) // 将 设备id与handler的id进行匹配,成功则继续往下
if ((handle = handler->connect(handler, dev, id))) // 链接 device与handler , 成功则继续往下
input_link_handle(handle); //将 handle链入input_handler_list和input_dev_list
继续 跟踪进这些函数
static struct input_device_id *input_match_device(struct input_device_id *id, struct input_dev *dev)
{
int i;
for (; id->flags || id->driver_info; id++) {
if (id->flags & INPUT_DEVICE_ID_MATCH_BUS) // 匹配 handler和device id 的 flag标志位
if (id->bustype != dev->id.bustype)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VENDOR)
if (id->vendor != dev->id.vendor)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_PRODUCT)
if (id->product != dev->id.product)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VERSION)
if (id->version != dev->id.version)
continue;
MATCH_BIT(evbit, EV_MAX); // 匹配 id 相关 标志位
MATCH_BIT(keybit, KEY_MAX);
MATCH_BIT(relbit, REL_MAX);
MATCH_BIT(absbit, ABS_MAX);
MATCH_BIT(mscbit, MSC_MAX);
MATCH_BIT(ledbit, LED_MAX);
MATCH_BIT(sndbit, SND_MAX);
MATCH_BIT(ffbit, FF_MAX);
MATCH_BIT(swbit, SW_MAX);
return id;
}
return NULL;
}
该 用于匹配input_dev 结构体 和input_handler 结构 体里面 定义 的input_device_id, 若 两者里面 有 任何 相关 变量不一样则匹配失败 (条件 真苛刻 )。
再看 handle = handler->connect(handler, dev, id) , connect函数即为static struct input_handle *evdev_connect(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id) , 为什么呢会是这个呢,我们先看 evdev.c中 的input_handler结构体定义 :
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
可 只 这里 input_handler 结构体 里边的connect即为evdev_connect函数
static struct input_handle *evdev_connect(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id)
{
1 struct evdev *evdev; //定义 一个evdev结构体指针
struct class_device *cdev;
int minor;
2 for (minor = 0; minor < EVDEV_MINORS && evdev_table[minor]; minor++);
if (minor == EVDEV_MINORS) {
printk(KERN_ERR "evdev: no more free evdev devices\n");
return NULL;
}
3 if (!(evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL)))
return NULL;
INIT_LIST_HEAD(&evdev->list);
init_waitqueue_(&evdev->wait);
evdev->exist = 1;
evdev->minor = minor;
evdev->handle.dev = dev;
evdev->handle.name = evdev->name;
evdev->handle.handler = handler;
evdev->handle.private = evdev;
sprintf(evdev->name, "event%d", minor);
evdev_table[minor] = evdev;
cdev = class_device_create(&input_class, &dev->cdev,
MKDEV(INPUT_MAJOR, EVDEV_MINOR_BASE + minor),
dev->cdev.dev, evdev->name);
/* temporary symlink to keep userspace happy */
sysfs_create_link(&input_class.subsys.kset.kobj, &cdev->kobj,
evdev->name);
return &evdev->handle;
}
先 看 1处 ,这里有个定义在evdev.c里边的新面孔
struct evdev {
int exist;
int ;
int minor;
char name[16];
struct input_handle handle; // 关联 input_handler和input_dev的input_handle
wait_queue_head_t wait;
struct evdev_list *grab;
struct list_ list;
};
evdev 这个 结构体就是 拿来应用 开发操作的 ,在 这里就是 对应 的设备文件实体, 结构体 前边定义了记录设备的一些信息 (设备号 ,打开状态、设备名字等 ), 这里还定义了一个input_handle的实体handle,没错这个handle就是要用来 关联 input_dev和input_handler的 , 后面还有一 行 加粗的部分后面再做介绍。
再 看 2处 , evdev_table [] 是 一个全局变量的数组 , 在evdev.c中有定义
#define EVDEV_MINORS 32
static struct evdev *evdev_table[EVDEV_MINORS];
在 前面 已经 说明了, 一个 device 可以 对应多个 handler , 而 一个handler也可处理多个 device, 这里体现 出了 后者 。既然 evdev这个结构体是 对应 的设备文件实体, 因为这个 handler可能会处理多个device,因此 该 handler要处理 n 个device就会应该有 n 个 evdev 实体,而这些实体的地址存放在evdev_table[] 这个指针 数组中,也就是说该handler最多只能处理EVDEV_MINORS 个 device , 而 2处 的这几句代码就是要evdev_table[] 这个 数组 看 还有没有 空着 的位置,有 的 话才会继续 进行 下面的程序。
再 看 3处 ,开辟 一个evdev结构体的内存空间,前面有说明过kzalloc 函数 ,这里不再说明。
后面 的代码就是为 evdev 结构体变量赋 初始值 了, 其中 init_waitqueue_(&evdev->wait) 初始化 等待队列,具体介绍 结合/linux/wait.h和查看 相关资料 (本人 不懂 )。
函数 最后 得到 evdev结构体内的hanlde地址并返回, 此时返回到 我们的int input_register_device(struct input_dev *dev) 函数 里面,最后 一句
input_link_handle(handle) ,进入 到该函数中发现
static void input_link_handle(struct input_handle *handle)
{
list_add_tail(&handle->d_node, &handle->dev->h_list);
list_add_tail(&handle->h_node, &handle->handler->h_list);
}
在 该中也 只是 将handle中的d_node和h_node 分别 接入到input_dev和input_handler的h_list中 , 此时input_dev、input_handler、input_handle 三者 形成了如图 2所示 的关系。
至此 设备注册 过程 算是全部完成了,但是 貌似 还有点乱 。 在 整个 设备的注册过程中函数的 嵌套一个 接着一个, 不仅 函数嵌套,结构体也使用了结构体和函数嵌套等,在 各个 函数内也用了大量的结构体指针等等 。 但 是 在整个 过程中 input_dev、input_handler、input_handle 这 三个结构体变量的实体也 都 只有一个。其中 input_dev 结构体实体在xxx_ts.c中直接定义了一个 input_dev 的 指针 全局变量 :
struct input_dev *tsdev;
并 在初始化 函数 中 开辟 了一个input_dev的内存空间并让tsdev指针指向它:
w55fa95_dev = input_allocate_device() ;
input_handler结构体 在evdev.c中也直接被定义了 并 初始化了
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
而 关联input_dev和input_handler的input_handle则是在调用 链接连接 函数static struct input_handle *evdev_connect(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id) 的 时候,在该函数的内部 调用 evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL) 开辟 了一个evdev结构体的内存空间 时 创建了 , input_handle就是使用了evdev结构体内部定义的input_handle 。
一个完整input设备系统不仅要有设备,还需要有处理程序input_handler, 而 上文中 主要 介绍的是设备注册、生成 、 以及和handler搭配的一个过程,而handler在 何时生成 的 ?
第三章 、input_handler 的 注册。
Input_handler是要和用户层打交道的 , 在evdev.c中直接定义了一个input_handler结构体并初始化了一些内部成员变量。
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops, // 用户 对设备操作的函数指针
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids, // 指向 一个evedev的指针数组
};
先看 第一 行 加粗的代码,evedev_fops结构体的定义 如下
static struct file_operations evdev_fops = {
.owner = THIS_MODULE,
.read = evdev_read,
.write = evdev_write,
.poll = evdev_poll,
.open = evdev_open,
.release = evdev_release,
.unlocked_ioctl = evdev_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = evdev_ioctl_compat,
#endif
.fasync = evdev_fasync,
.flush = evdev_flush
};
相信 做过 linux 设备驱动编程的对这 都很熟悉 了,就是一大堆的用户接口函数,包括对设备的 、close、read、write、ioctl等。
再 看第二行代码加粗的部分 .id_table = evdev_ids, id.table 就是 前面所说过要和input_dev的id匹配的这么一个结构体,这里让它初始化为evdev_ids,在看evdev_ids的定义 :
static struct input_device_id evdev_ids[] = {
{ .driver_info = 1 }, /* Matches all devices */
{ }, /* Terminating zero entry */
};
MODULE_DEVICE_TABLE(input, evdev_ids);
这里是 一个结构体数组, 令 数组中 第一个 结构体的该成员变量driver_info的值为 1, 其他成员变量均 未 定义,说明 这个 handler对 所有 device的id都能匹配得上 。数组 中的第二个结构体为空 表示 结束 ,用来 标识结束配合下面的MODULE_DEVICE_TABLE(input, evdev_ids) 使用 ,关于MODULE_DEVICE_TABLE 宏定义 介绍自行查看 相关 文献 (我也 不懂 )。
接下来 进入正题,input_handler的注册 !
Input_handler的注册和input_dev的注册很相似,大同小异罢了,在evdev.c源码中 显示 定义并初始化了一个input_handler结构体并直接给相关的 成员 变量赋值了,就是本章开始所将的部分,然后再初始化中注册一个input_handler:
static int __init evdev_init(void)
{
input_register_handler(&evdev_handler);
return 0;
}
这里 只调用了一个input_register_handler() 函数, 看起来应该是很简单的样子 (相比 input_dev的注册 ),继续 跟踪进入到该函数中:
void input_register_handler(struct input_handler *handler)
{
struct input_dev *dev;
struct input_handle *handle;
struct input_device_id *id;
if (!handler) return;
INIT_LIST_HEAD(&handler->h_list);
if (handler->fops != NULL)
input_table[handler->minor >> 5] = handler;
list_add_tail(&handler->node, &input_handler_list);
list_for_each_entry(dev, &input_dev_list, node)
if (!handler->blacklist || !input_match_device(handler->blacklist, dev))
if ((id = input_match_device(handler->id_table, dev)))
if ((handle = handler->connect(handler, dev, id)))
input_link_handle(handle);
input_wakeup_procfs_readers();
}
该函数 中代码加粗的部分,与input_register_device() 里的如出一辙,这里不再做说明。
至此input_handler 的注册已经 结束 。
第四章 、input 子系统数据 结构
下 图 3是以 设备为例子的input子系统 数据 结构图。
|
| 图3 input子系统图 |
进行 到这里,又多冒出来了一个struct evdev_list的结构体, 这 在之前并没有提到过,因为在注册input_dev和input_handler过程中并没有用到过, 查看 该结构体:
struct evdev_list {
struct input_event buffer[EVDEV_BUFFER_SIZE]; // 存放 设备数据信息
int head; // buffer 的 下标 ,标识从设备中过来 要 存放到buffer的 数据 的位置
int tail; //buffer的下标,标识用户读取
转载地址:https://loongembedded.blog.csdn.net/article/details/50818165 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
路过,博主的博客真漂亮。。
[***.116.15.85]2024年05月02日 11时52分56秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
从零开始安装Hadoop视频教程
2019-05-01
一款非常实用的在线代码分享站点
2019-05-01
教你一分钟制作自己的电子书(视频)
2019-05-01
用ipad维护Linux服务器
2019-05-01
如何用手机维护Mysql数据库
2019-05-01
企业内网信息安全实践-记ChinaUnix技术交流
2019-05-01
完成《Java编程入门》初稿
2019-05-01
Windows Server 2012下安装Hyper-V虚拟机
2019-05-01
MacOSX和Windows 8的完美融合
2019-05-01
Iphone5S 体验(视频+截图)
2019-05-01
python 多进程之进程池的操作
2019-05-01
flask入门学习之第一个程序及装饰器回顾
2019-05-01
flask整理之 flask程序中的debug模式
2019-05-01
如何和大妈解释区块链,让他们理解区块链
2019-05-01
比特币要出现夭折?或许会出现转折
2019-05-01
比特币,山寨币,到底谁占有主导地位
2019-05-01
比特币,父母这一辈能接受吗?
2019-05-01
解释区块链钱包的意思
2019-05-01
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311273463 位访客
访问时间: 2024-05-06 04:26:32
访问IP: 3.19.30.232
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版