LeetCode 2019 力扣杯全国秋季编程大赛
 我证明了:我不是最菜的!!!
我证明了:我不是最菜的!!! 
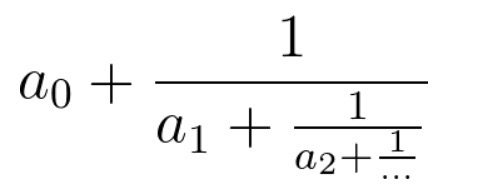 连分数是形如上图的分式。在本题中,所有系数都是大于等于0的整数。
连分数是形如上图的分式。在本题中,所有系数都是大于等于0的整数。
发布日期:2021-07-01 03:15:45
浏览次数:2
分类:技术文章
本文共 4069 字,大约阅读时间需要 13 分钟。
文章目录
1. 比赛结果
2019.9.24晚,第一次参加线上比赛
:582/1541,做出了2道题。。。 我证明了:我不是最菜的!!! 2. 题目解析
2.1 猜数字 Easy
输入的guess数组为 小A 每次的猜测,answer数组为 小B 每次的选择。guess和answer的长度都等于3。
示例 1:输入:guess = [1,2,3], answer = [1,2,3]输出:3解释:小A 每次都猜对了。 示例 2:输入:guess = [2,2,3], answer = [3,2,1]输出:1解释:小A 只猜对了第二次。
限制:guess的长度 = 3answer的长度 = 3guess的元素取值为 {1, 2, 3} 之一。answer的元素取值为 {1, 2, 3} 之一。 送分题目,不解释,只是一开始觉得这么简单,会不会坑我
class Solution { public: int game(vector & guess, vector & answer) { int count = 0; for(int i = 0; i < 3; ++i) { if(guess[i] == answer[i]) ++count; } return count; }}; 2.2 分式化简 Esay
连分数是形如上图的分式。在本题中,所有系数都是大于等于0的整数。 输入的cont代表连分数的系数(cont[0]代表上图的a0,以此类推)。返回一个长度为2的数组[n, m],使得连分数的值等于n / m,且n, m最大公约数为1。
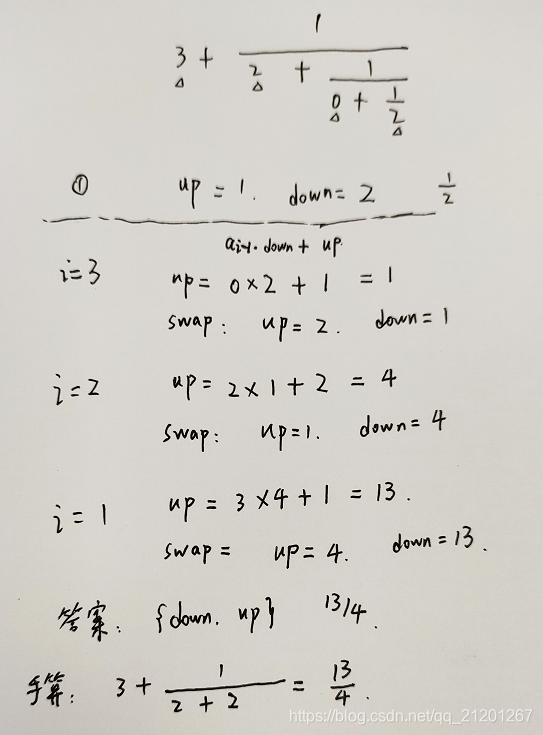
示例 1:输入:cont = [3, 2, 0, 2]输出:[13, 4]解释:原连分数等价于3 + (1 / (2 + (1 / (0 + 1 / 2))))。注意[26, 8], [-13, -4]都不是正确答案。示例 2:输入:cont = [0, 0, 3]输出:[3, 1]解释:如果答案是整数,令分母为1即可。限制:cont[i] >= 01 <= cont的长度 <= 10cont最后一个元素不等于0答案的n, m的取值都能被32位int整型存下(即不超过2 ^ 31 - 1)。
- 数学递推公式推导
- 用up表示初始分子(1),down表示初始分母(最后一个系数)
- 递推公式 u p = d o w n ∗ a i + u p up = down * a_i+up up=down∗ai+up
- 然后颠倒分子分母
class Solution { public: vector fraction(vector & cont) { int up = 1, down = cont.back(), i; for(i = cont.size() - 1; i >= 1; --i) { up = down*cont[i-1]+up; swap(up, down); } return { down, up}; }}; 2.3 机器人大冒险 Medium
U: 向y轴正方向移动一格
R: 向x轴正方向移动一格。 不幸的是,在 xy 平面上还有一些障碍物,他们的坐标用obstacles表示。机器人一旦碰到障碍物就会被损毁。给定终点坐标(x, y),返回机器人能否完好地到达终点。如果能,返回true;否则返回false。
示例 1:输入:command = "URR", obstacles = [], x = 3, y = 2输出:true解释:U(0, 1) -> R(1, 1) -> R(2, 1) -> U(2, 2) -> R(3, 2)。示例 2:输入:command = "URR", obstacles = [[2, 2]], x = 3, y = 2输出:false解释:机器人在到达终点前会碰到(2, 2)的障碍物。示例 3:输入:command = "URR", obstacles = [[4, 2]], x = 3, y = 2输出:true解释:到达终点后,再碰到障碍物也不影响返回结果。 限制:2 <= command的长度 <= 1000command由U,R构成,且至少有一个U,至少有一个R0 <= x <= 1e9, 0 <= y <= 1e90 <= obstacles的长度 <= 1000obstacles[i]不为原点或者终点
class Solution { // 超时 代码public: bool robot(string command, vector >& obstacles, int x, int y) { int ax = 0, by = 0; unordered_multimap m; for(auto it = obstacles.begin(); it != obstacles.end(); it++) { m.insert(make_pair((*it)[0],(*it)[1]));//建立哈希表 } for(int i = 0; i < command.size(); i++) { if(ax > x || by > y) break;//走过了,肯定达到不了终点 if(command[i] == 'U') by += 1; else ax += 1; if(ax == x && by == y) return true;//达到终点 if(i == command.size()-1) i = -1;//循环执行 auto range = m.equal_range(ax); auto it = range.first; while(it != range.second)//查找当前坐标是否是障碍物 { if(by == (*it).second) return false; ++it; } } return false; }}; 上面的效率还是有问题,可能不能这么干
正解:
- 找到一串命令可以走到的位置,存入哈希表
- 求出多少个循环可以到达终点,把终点移到上面一串指令走过的范围,进行检查
- 障碍物也是一样处理
class Solution { public: bool robot(string command, vector >& obstacles, int x, int y) { int ax = 0, by = 0, circle, px, py; unordered_map > m; m[0].insert(0); for(int i = 0; i < command.size(); i++) { if(command[i] == 'U') by += 1; else ax += 1; m[ax].insert(by);//一串指令走过的点 } circle = min(x/ax, y/by);//循环次数 px = x-ax*circle; py = y-by*circle; if(!m.count(px) || !m[px].count(py)) return false;//终点不在路径上 for(int i = 0; i < obstacles.size(); ++i) { if(obstacles[i][0] > x || obstacles[i][1] > y) continue;//障碍物在终点范围外 circle = min(obstacles[i][0]/ax, obstacles[i][1]/by); px = obstacles[i][0]-ax*circle; py = obstacles[i][1]-by*circle; if(m.count(px) && m[px].count(py)) return false;//路径包含障碍物 } return true; }}; 12 ms 8.4 MB
2.4 覆盖 Hard
2.5 发 LeetCoin Hard
转载地址:https://michael.blog.csdn.net/article/details/101345174 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
能坚持,总会有不一样的收获!
[***.219.124.196]2024年05月05日 02时52分31秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
Qt图形视图框架
2021-07-05
Qt5中表格处理大数据量
2021-07-05
LeakCanary源码分析
2021-07-05
单例模式(Singleton)
2021-07-05
ucOS 时钟中断(ISR)
2019-05-02
android Handler解析
2019-05-02
java synchronized详解
2019-05-02
android之Http使用简介
2019-05-02
debian 有用的源
2019-05-02
Linux 安装 .NET Core 1.0 SDK
2019-05-02
我对卓越团队的理解
2019-05-02
linux epoll简介
2019-05-02
python装饰器学习总结
2019-05-02
我在Facebook学到的10个经验
2019-05-02
c语言知识点补遗
2019-05-02
python开发总结五
2019-05-02
EL、JSTL、servlet
2019-05-02
2 QCreator调试并查看源码
2019-05-02
4 Qt 之 pro 配置多个子工程/子模块
2019-05-02
12 Qt 之 QToolBox、QLCDNumber
2019-05-02
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311879037 位访客
访问时间: 2024-05-08 02:52:31
访问IP: 3.143.9.115
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版