从伺服系统来看如何提升机器人的轨迹精度 公开课笔记
发布日期:2021-07-01 04:03:43
浏览次数:2
分类:技术文章
本文共 45 字,大约阅读时间需要 1 分钟。
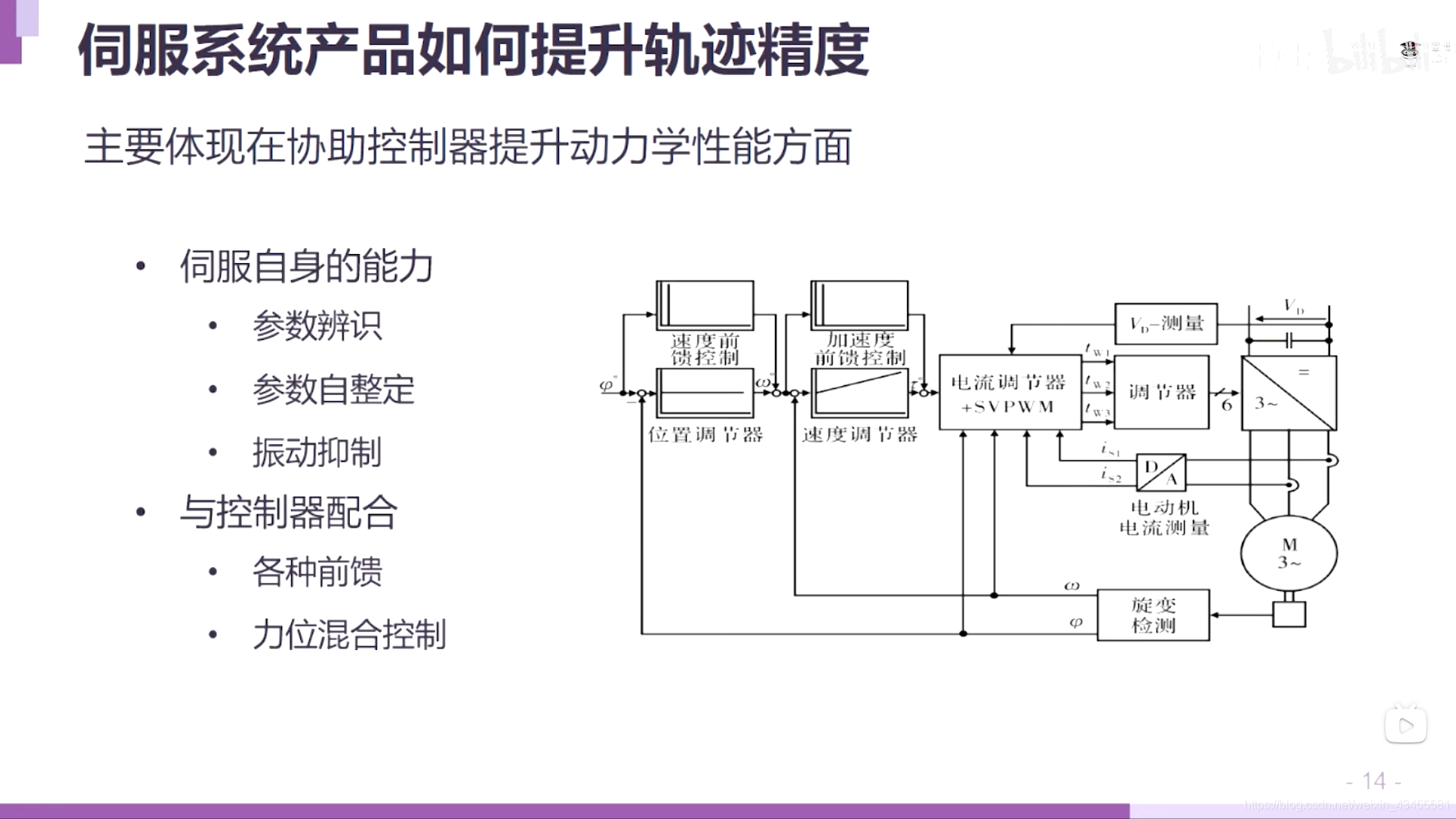
声明:本文所有图片均截自bilibili堂博士UP上传的公开课,仅作为个人笔记记录,侵删~
转载地址:https://miracle.blog.csdn.net/article/details/116537546 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
路过按个爪印,很不错,赞一个!
[***.219.124.196]2024年04月15日 05时22分14秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311833596 位访客
访问时间: 2024-05-07 23:07:50
访问IP: 18.117.196.184
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版