机器人学轨迹规划笔记
发布日期:2021-07-01 04:03:49
浏览次数:3
分类:技术文章
本文共 207 字,大约阅读时间需要 1 分钟。
文章目录
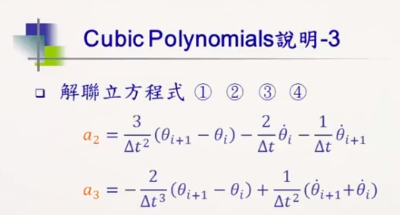
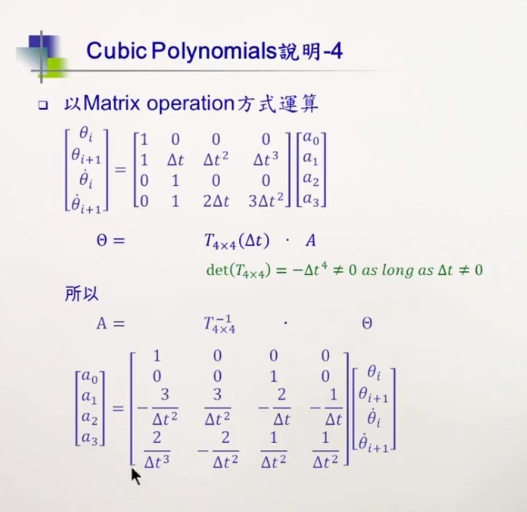
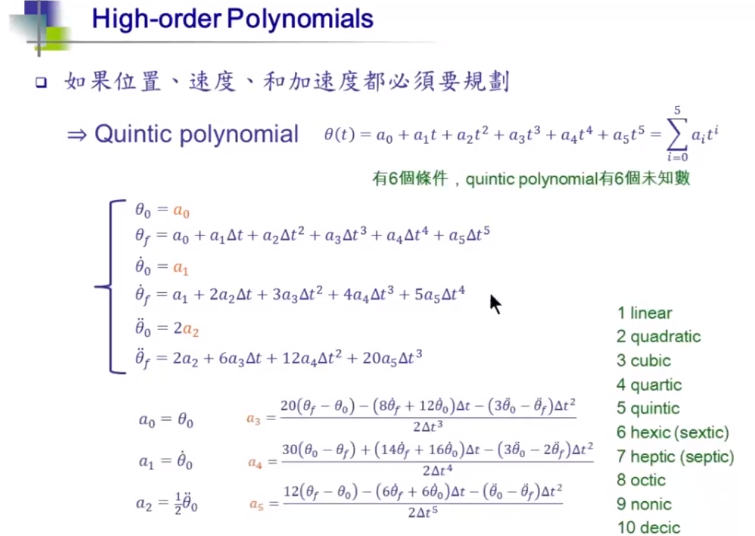
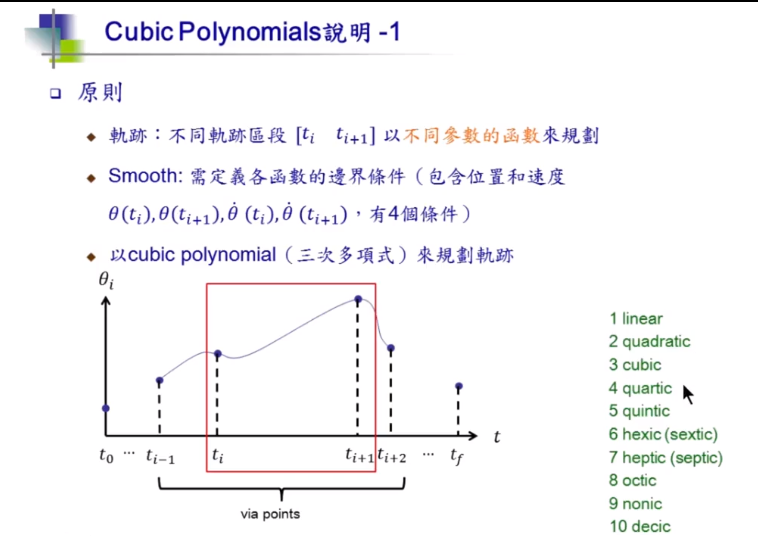
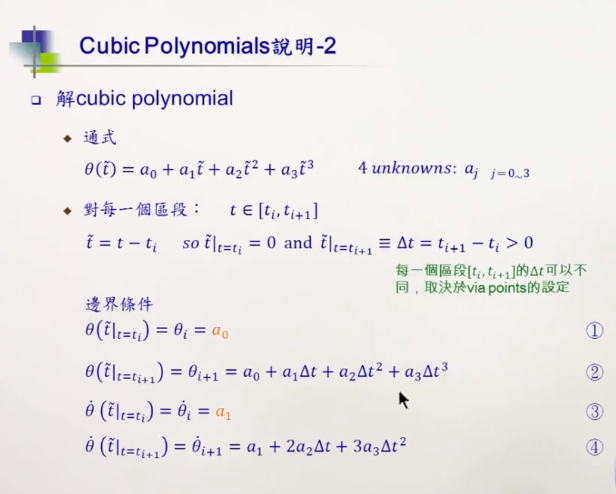
1. Cubic Polynomials
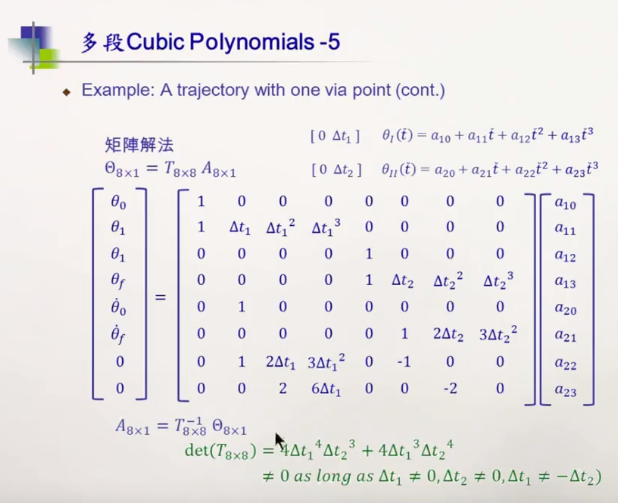
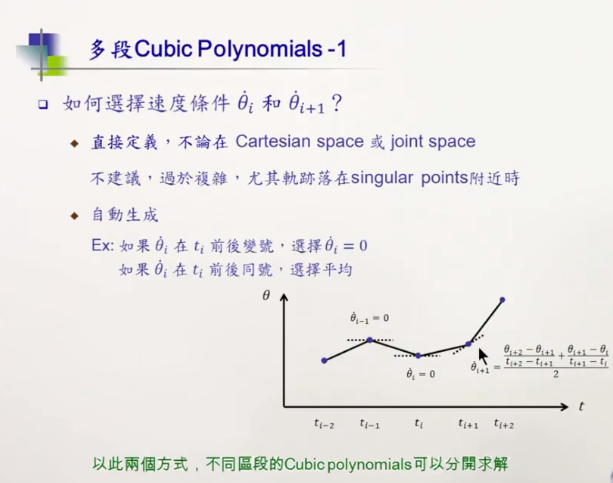
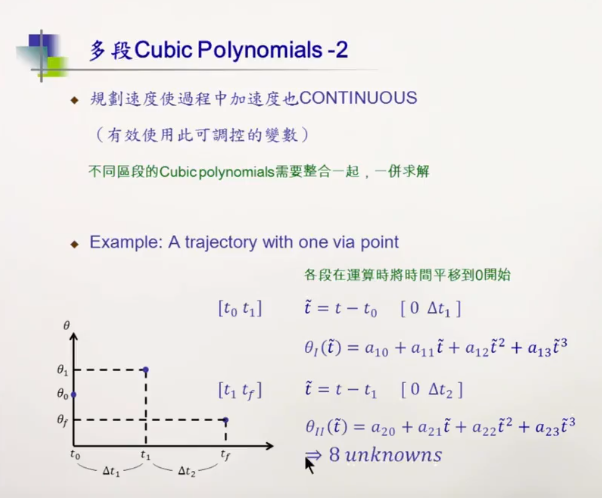
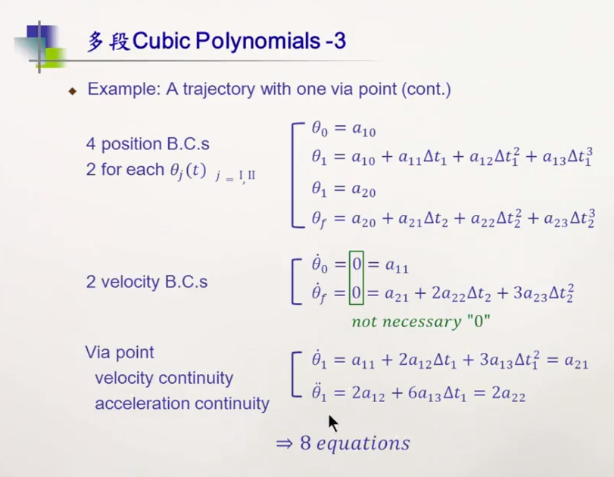
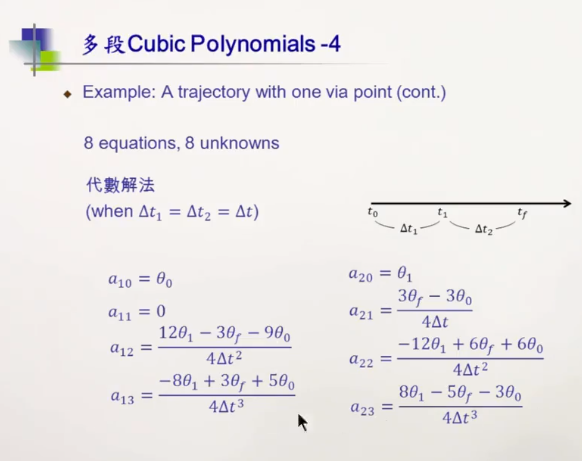
2. 多段Cubic Polynomials
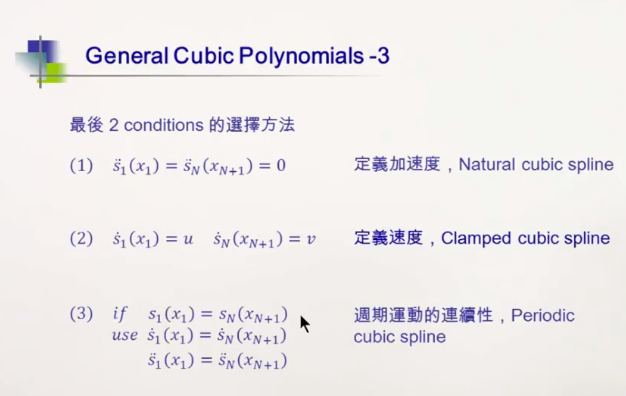
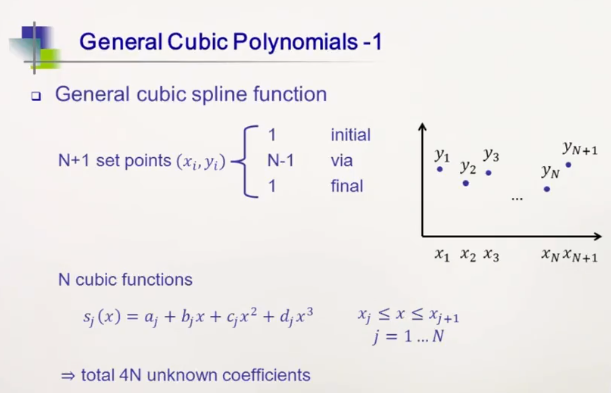
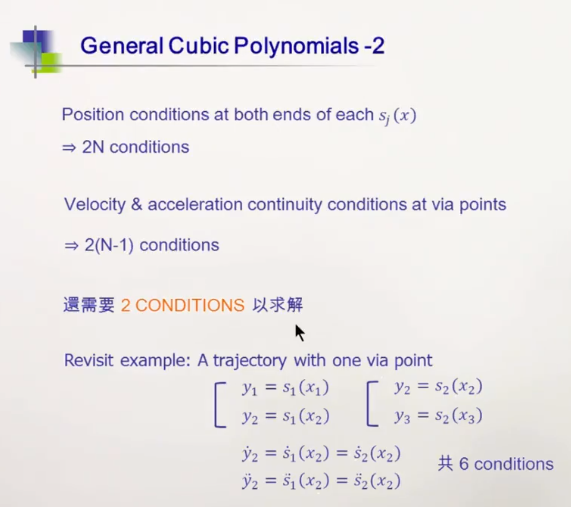
3. General Cubic Polynomials
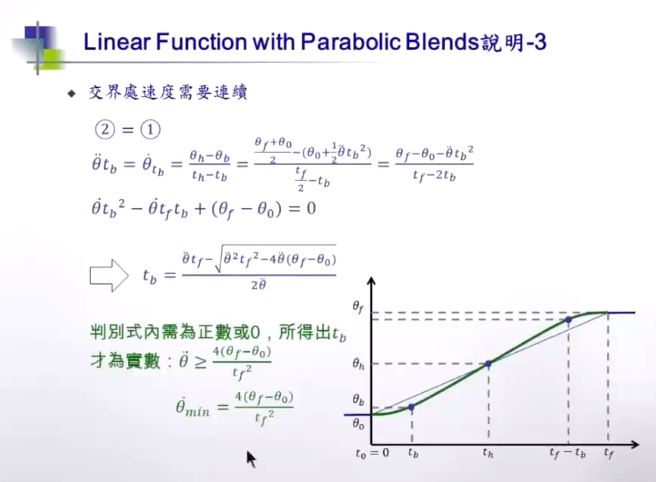
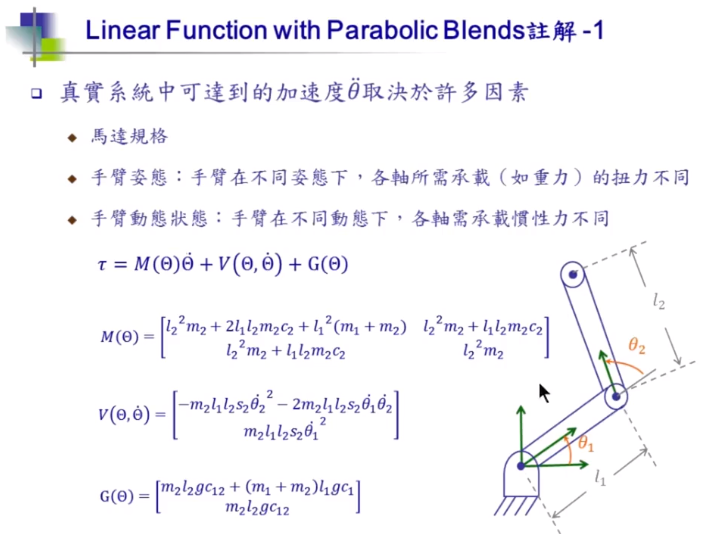
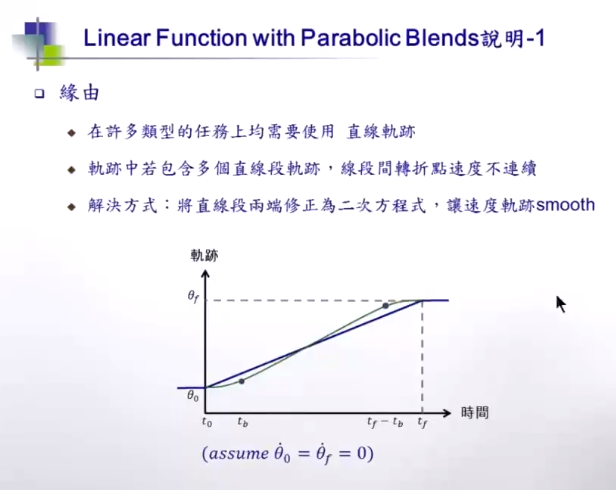
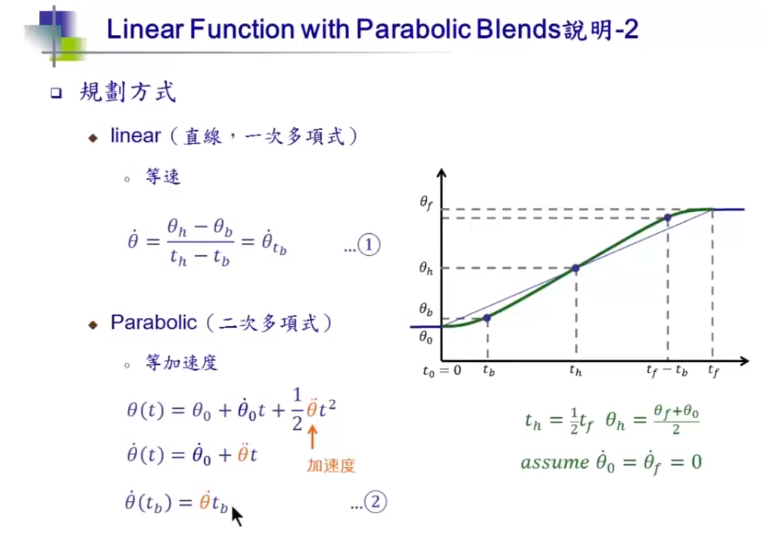
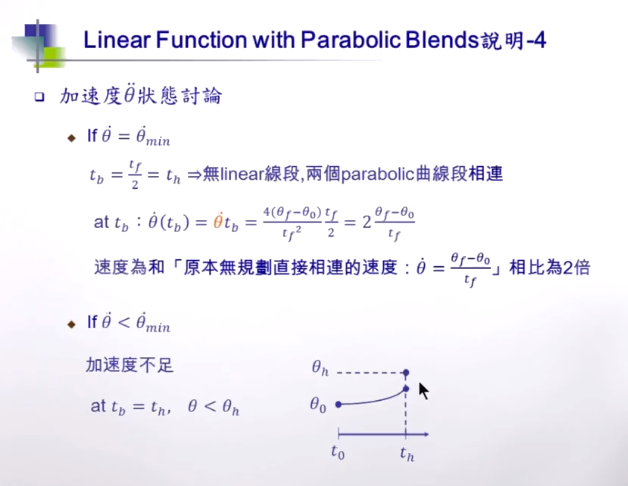
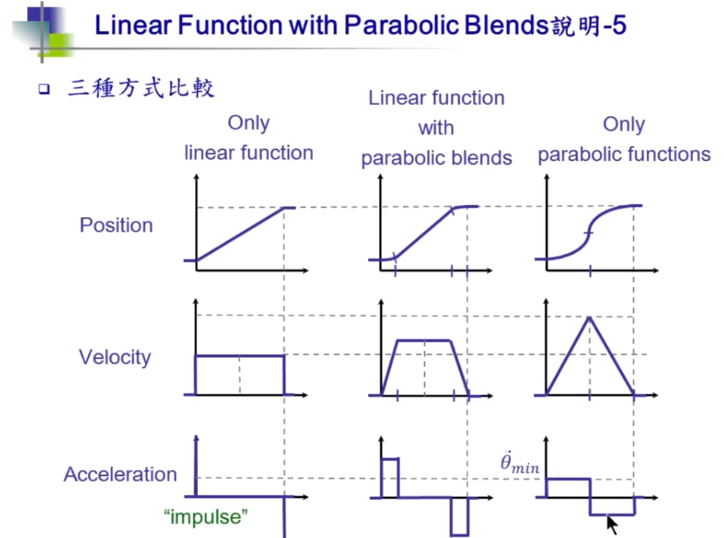
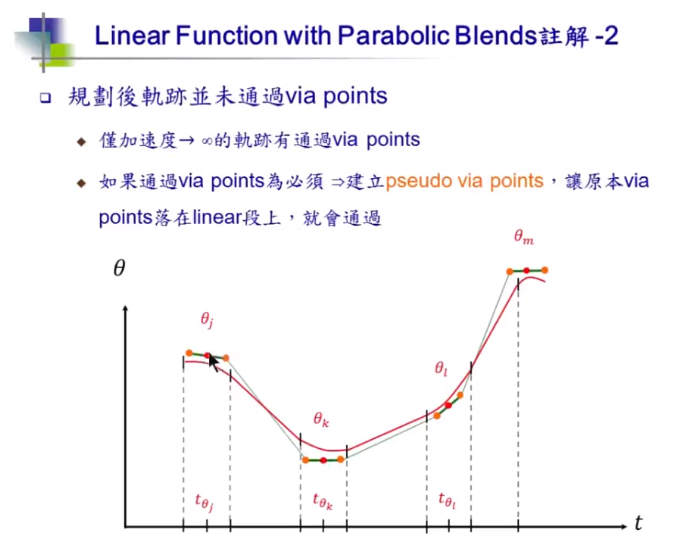
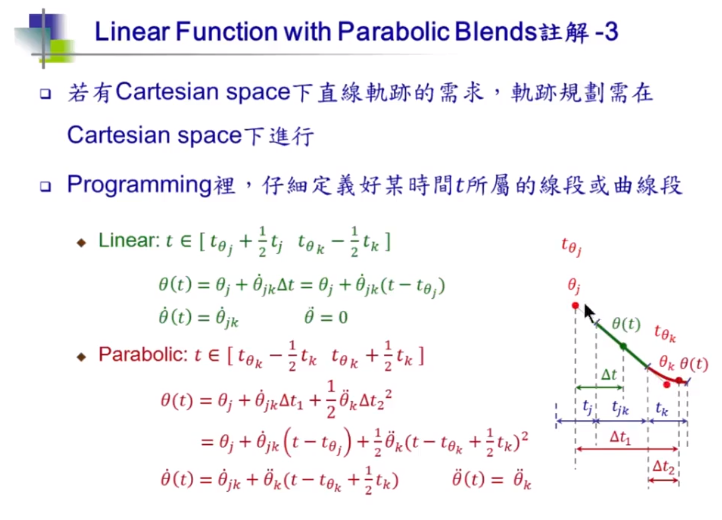
4. Linear Function with Parabolic Blends
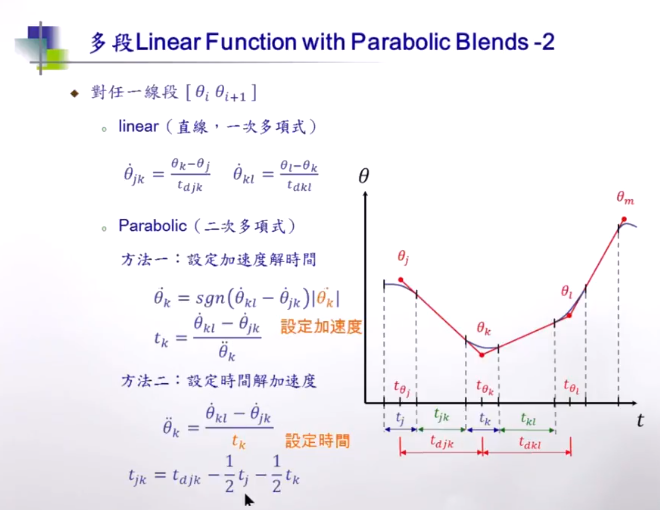
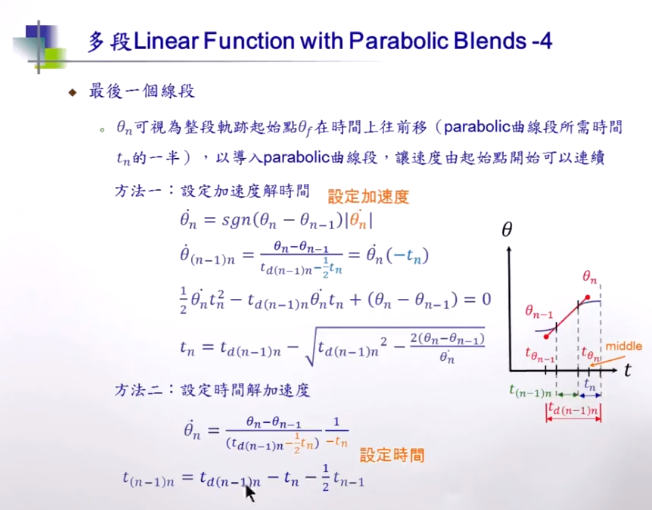
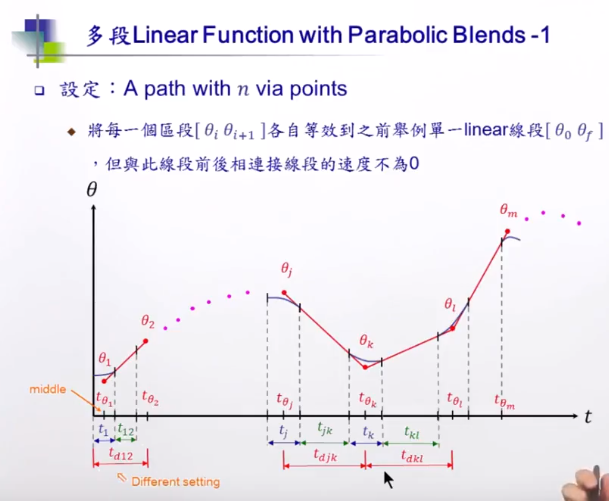
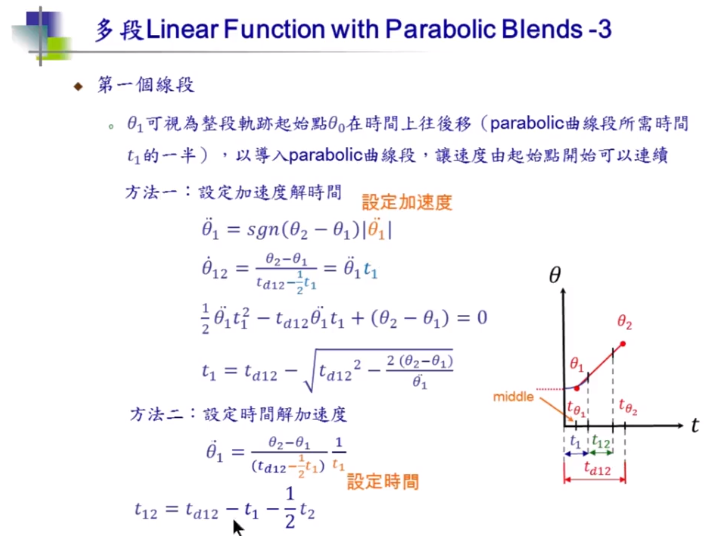
5. 多段Linear Function with Parabolic Blends
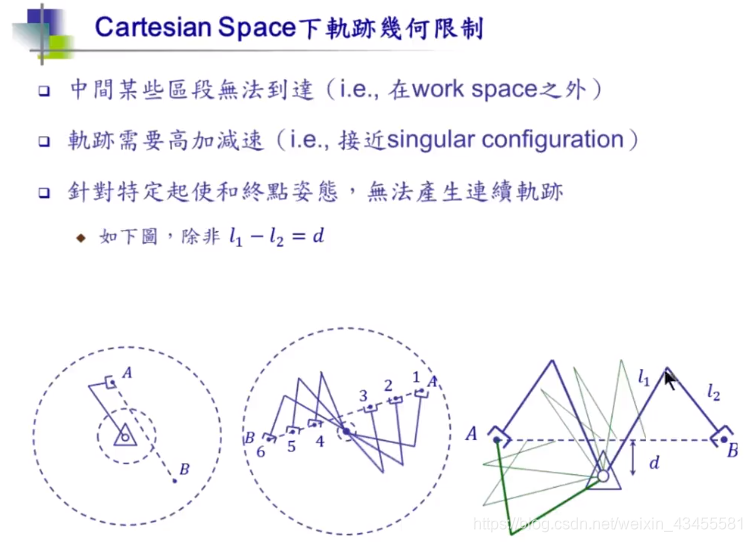
6. Cartesian Space下轨迹几何限制
PPT摘自台大林沛群老师的机器人学课程
转载地址:https://miracle.blog.csdn.net/article/details/117389773 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
感谢大佬
[***.8.128.20]2024年04月23日 06时18分26秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
Java编程思想笔记——第十章 内部类
2019-05-02
Java编程思想笔记——第十四章 类型信息
2019-05-02
为什么商业搜索引擎选择的索引更新策略是完全重建策略
2019-05-02
MySQL学习笔记——慢查询
2019-05-02
elastic-job监控平台搭建
2019-05-02
JVM的栈帧
2019-05-02
Java实现排列组合
2019-05-02
通俗易懂的Java线程不安全
2019-05-02
PL/SQL学习笔记之异常
2019-05-02
PL/SQL学习笔记之触发器
2019-05-02
Memcache内存缓存框架
2019-05-02
Redis
2019-05-02
Python字符编码和转码
2019-05-02
odoo10学习笔记十一:视图综述
2019-05-02
commons-dbutils【不推荐】
2019-05-02
SOCAT端口转发
2019-05-02
docker快速搭建HTTP代理
2019-05-02
jpa的entry审查Auditing
2019-05-02
mongdb查询笔记
2019-05-02
facebook区块链libra测试网体验
2019-05-02
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311886840 位访客
访问时间: 2024-05-08 03:25:38
访问IP: 18.119.139.50
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版