Platinum Maestro运动控制器 —— 运动程序笔记
发布日期:2021-07-01 04:03:59
浏览次数:5
分类:技术文章
本文共 1513 字,大约阅读时间需要 5 分钟。
说明
留坑待填
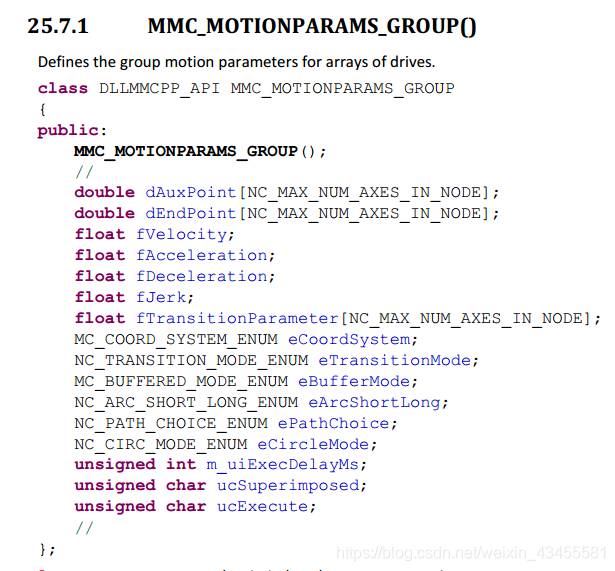
class DLLMMCPP_API MMC_MOTIONPARAMS_GROUP{public: MMC_MOTIONPARAMS_GROUP(); // double dAuxPoint[NC_MAX_NUM_AXES_IN_NODE]; //rray [1 . .N]为输入信号CoordSystem指定的坐标系中每个维度的绝对位置,N为供应商特定。数组参数NC_MAX_NUM_AXES_IN_NODE被限制为16,并定义为一个组中轴的最大数量.dAuxPoint可以有向量数组[1…3]技术单位的两倍值[u]。[NC_MAX_NUM_AXES_IN_NODE]是一个值数组[2…15]。 double dEndPoint[NC_MAX_NUM_AXES_IN_NODE]; //Array [1 . .N]为输入信号CoordSystem指定的坐标系中每个维度的绝对端点位置,N为供应商特定。数组参数NC_MAX_NUM_AXES_IN_NODE被限制为16,并定义为一个组中轴的最大数量。dEndPoint是技术单元[u]中的二维或三维双向量数组。[NC_MAX_NUM_AXES_IN_NODE]是一个值数组[2…15]。 float fVelocity;//定义路径的最大速度(不一定达到)的值。u/s中的任何正值 float fAcceleration;//加速度,u/s^2 float fDeceleration;//负加速度,u/s^2 float fJerk;//加加速度,/s^3 float fTransitionParameter[NC_MAX_NUM_AXES_IN_NODE]; //根据过渡模式的不同,可以使用不同的供应商特定的过渡参数来表征轮廓曲线。数组参数NC_MAX_NUM_AXES_IN_NODE被限制为16,并定义为一个组中轴的最大数量。根据TransitionMode参数,fTransitionParameter可以在适当的单元中有任何正的浮点值。参考截面坐标系和运动学变换.[NC_MAX_NUM_AXES_IN_NODE]是一个值数组[2…15]。 MC_COORD_SYSTEM_ENUM eCoordSystem; //定义支持的坐标系统的类型。 NC_TRANSITION_MODE_ENUM eTransitionMode; //定义受支持的NC_TRANSITION_MODE_ENUM枚举器转换模式。参考下面的多轴运动控制—转换和缓冲模式和选项。------P1973 MC_BUFFERED_MODE_ENUM eBufferMode; //MC_BUFFERED_MODE_ENUM枚举器定义了轴的行为。 NC_ARC_SHORT_LONG_ENUM eArcShortLong; //定义支持的弧长类型 NC_PATH_CHOICE_ENUM ePathChoice; //定义所支持路径选择的NC_PATH_CHOICE_ENUM枚举器类型。 NC_CIRC_MODE_ENUM eCircleMode; //在2D中定义受支持的循环模式的类型。参考节坐标系统和运动学变换。 unsigned int m_uiExecDelayMs; //执行下一个动作的延迟(以秒为单位)。任意+ve整数值。 unsigned char ucSuperimposed; //是否操作了叠加选项。接受的值是布尔值真/假。 unsigned char ucExecute;//从上升边缘启动执行命令。布尔真/假值 //}; 转载地址:https://miracle.blog.csdn.net/article/details/91346797 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
做的很好,不错不错
[***.243.131.199]2024年04月27日 04时01分26秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
Nginx的负载均衡的那点事
2019-05-02
实现nginx的负载均衡
2019-05-02
695. 岛屿的最大面积
2019-05-02
Nginx配置详解
2019-05-02
200. 岛屿数量
2019-05-02
Redis 3.2.1版配置 中英文对照翻译
2019-05-02
平衡二叉树之红黑树
2019-05-02
算法——查找之散列表
2019-05-02
算法——图之加权有向图
2019-05-02
Hive安装
2019-05-02
JAVA多线程——线程安全之原子性,有序性和可见性
2019-05-02
Java 并发工具包 java.util.concurrent 用户指南
2019-05-02
docker创建ssh镜像并分配固定ip
2019-05-02
docker kafka集群安装部署
2019-05-02
hadoop docker安装部署
2019-05-02
Java Map.merge() 使用
2019-05-02
Lambda 提取排名前十的列表
2019-05-02
Lambda收集器示例
2019-05-02
java try-with-resource语句使用
2019-05-02
课间十分钟
2019-05-02
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 311814318 位访客
访问时间: 2024-05-07 21:47:02
访问IP: 3.21.233.41
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版