机器人学,机器视觉与控制学习笔记——第二章、位置与姿态描述
发布日期:2021-06-29 01:50:38
浏览次数:2
分类:技术文章
本文共 448 字,大约阅读时间需要 1 分钟。
在这一章中主要任务是学习如何在二维和三维世界中描述点和位姿。对于一个点来说我们描述他时只用位置就够了,但是对于描述一个物体来说,我们不仅需要说明位置还需要说明姿态,我们将位置和姿态统称为位姿。
首先应该明确的是
1.一个点用坐标向量来表示,它代表该点在参考坐标系中的位移;
2.刚体用一个单独的坐标系表示,刚体上的点可以用在该坐标系中的向量表示。
3.一个刚体在坐标系中的位置和方向统称为位姿。
4.相对位姿是指一个坐标系相对于另一个坐标系的位姿。
5.空间中的同一个点在不同坐标系下用不同向量表示,他们之间可以用相对位姿转换。
常见的描述旋转变换的方法有
1.正交旋转矩阵
2.欧拉角
3.卡尔丹角或RPY角
4.双向量法
5.绕任意向量选转
6.单位四元数法
具体公式可以参考:
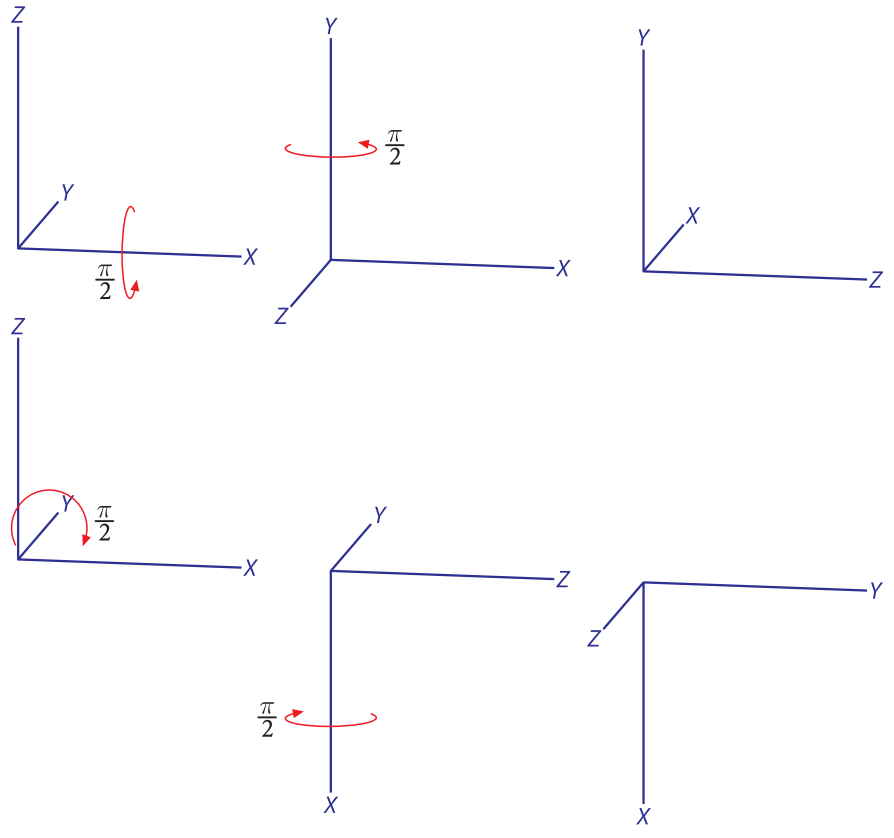
需要注意的是旋转的顺序是不能交换的例如:
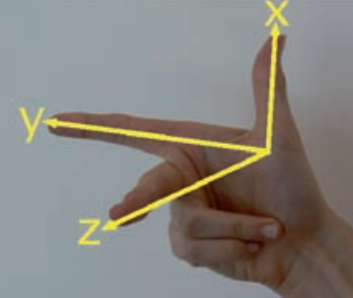
用右手快速判定三个坐标轴的方向
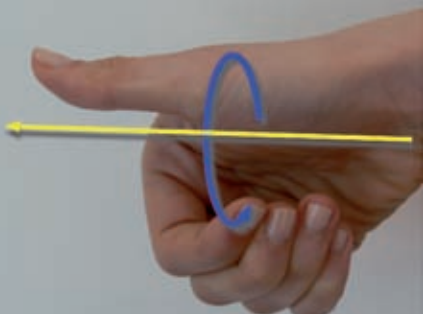
用右手螺旋定则快速判定旋转方向的正负
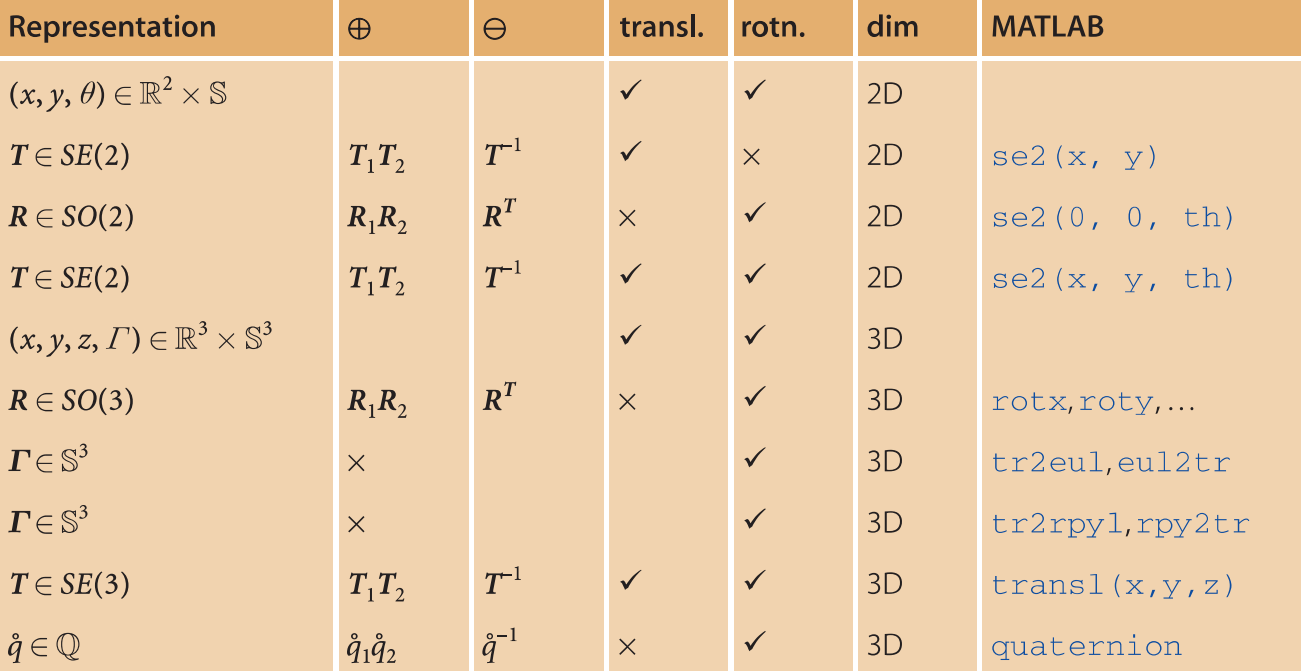
下表是位姿变换的各种具体描述方法和工具箱中对应的函数
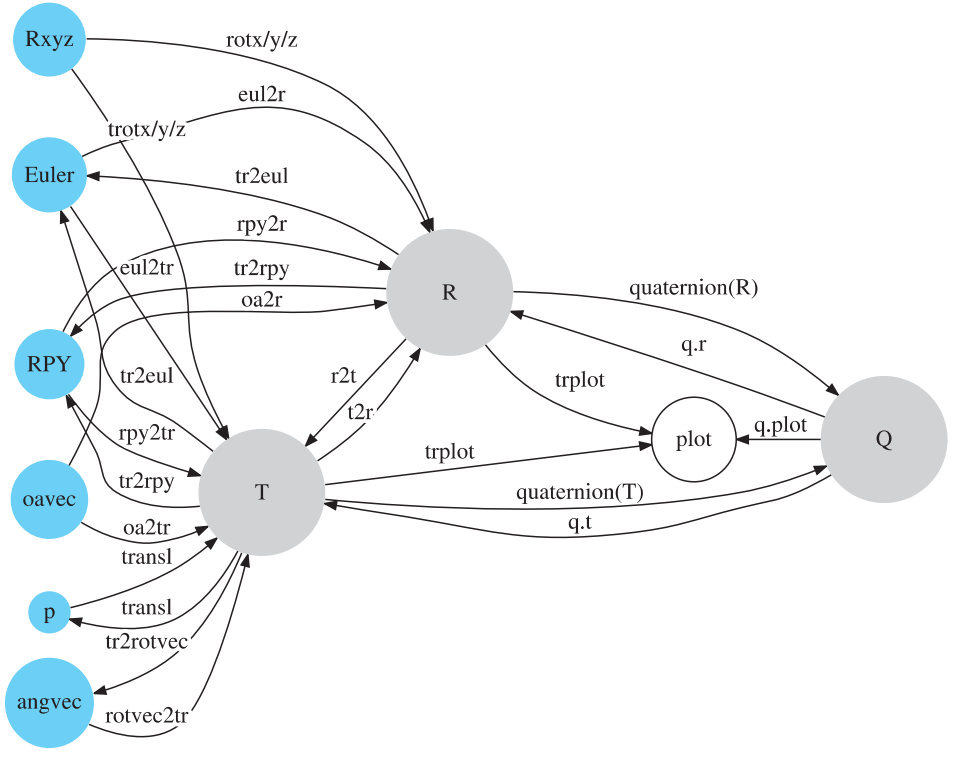
下图是不同描述方法间的转换和工具箱中对应的函数
转载地址:https://blog.csdn.net/yukinoai/article/details/78955761 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
路过,博主的博客真漂亮。。
[***.116.15.85]2024年04月12日 09时53分36秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
大数据技术生态圈讲解
2019-04-29
Hadoop、Spark、HBase与Redis的适用性见解
2019-04-29
spark概述
2019-04-29
Hadoop、MapReduce、YARN和Spark的区别与联系
2019-04-29
我终于搞清楚了和String有关的那点事儿。
2019-04-29
Kafka入门---概念
2019-04-29
springcloud 第一篇: 服务的注册与发现Eureka(Finchley版本)
2019-04-29
springcloud 第三篇: 服务消费者(Feign)(Finchley版本)
2019-04-29
Java关于JDBC的基本使用
2019-04-29
git配置与使用说明
2019-04-29
python
2019-04-29
网络协议
2019-04-29
进程和线程
2019-04-29
sql面试题
2019-04-29
linux基础与调优
2019-04-29
centos7安装
2019-04-29
hadoop相关介绍
2019-04-29
HTTP协议解析
2019-04-29
数据结构
2019-04-29
软件测试基础
2019-04-29
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 309308178 位访客
访问时间: 2024-04-30 09:53:36
访问IP: 3.128.79.88
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版