论文阅读-位姿估计-SE3-Nets Learning Rigid Body Motion using Deep Neural Networks
 作者的网络分为两个部分: 1.Encoder部分输入点云,同时用一个全连接网络来接收控制输入,结果 2.在Encoder之后,Decoder部分做了两件事: - 将区域按照目标分类,识别出那些一同运动的像素部分(称之为一个目标),文中用一个mask(仅仅包含目标部分)来区分各个不同区域的目标。 值得注意的是,目标的个数k是网络训练前提前设置好的。所以这可以转为分类问题,对每一个输入像素分为k个类别之一。这个过程和普通的深度预测网络十分类似:skip,降采样+升采样。由于类别之间离散不可导(?),作者分别计算每一个点在k个类别的分布概率(总和为1)。
作者的网络分为两个部分: 1.Encoder部分输入点云,同时用一个全连接网络来接收控制输入,结果 2.在Encoder之后,Decoder部分做了两件事: - 将区域按照目标分类,识别出那些一同运动的像素部分(称之为一个目标),文中用一个mask(仅仅包含目标部分)来区分各个不同区域的目标。 值得注意的是,目标的个数k是网络训练前提前设置好的。所以这可以转为分类问题,对每一个输入像素分为k个类别之一。这个过程和普通的深度预测网络十分类似:skip,降采样+升采样。由于类别之间离散不可导(?),作者分别计算每一个点在k个类别的分布概率(总和为1)。
发布日期:2022-01-31 02:37:24
浏览次数:24
分类:技术文章
本文共 1034 字,大约阅读时间需要 3 分钟。
SE3-Nets Learning Rigid Body Motion using Deep Neural Networks(1)
- 输入:三维点;系统输入(如推力); - 输出:三维点该论文只针对三维点云输入(RGBD等),来求解每帧中目标物体的刚体变换关系(SE(3), pose)。
在这些深度学习框架的位姿估计问题中,旋转都使用旋转向量(3维度)的方式。
以及需要分割的个数(?提前知道个数,最大个数吧?),得到各个分割块的pose(随后可以根据pose将点云转换过去)
SE3-NETS learn to segment effected object parts and predict their motion resulting from the applied force.作者认为之前的物理模型(非深度模型)虽好,但依赖的是精准的观测量和基于此的精准的预测,而人是靠直觉、模糊的预测来行动的。而之前的基于物理
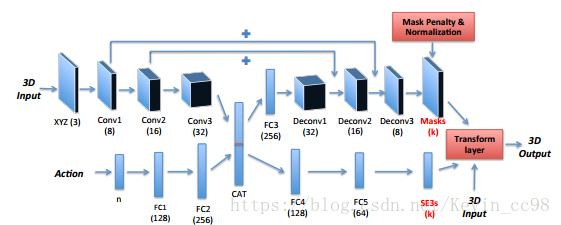
1.流程和网络架构
如图:
作者的网络分为两个部分: 1.Encoder部分输入点云,同时用一个全连接网络来接收控制输入,结果 2.在Encoder之后,Decoder部分做了两件事: - 将区域按照目标分类,识别出那些一同运动的像素部分(称之为一个目标),文中用一个mask(仅仅包含目标部分)来区分各个不同区域的目标。 值得注意的是,目标的个数k是网络训练前提前设置好的。所以这可以转为分类问题,对每一个输入像素分为k个类别之一。这个过程和普通的深度预测网络十分类似:skip,降采样+升采样。由于类别之间离散不可导(?),作者分别计算每一个点在k个类别的分布概率(总和为1)。 - 接下来对每一目标物体的SE3进行预测。
最后通过转移层将所有信息汇总起来:对k个可能的pose进行得到最终变换之后的三维点位姿进行加权求和得到最终位姿,从而得到最终每个点的刚体变换。这里的权重是之前提到的概率
2.结果
作者在仿真数据和真实数据上测试。训练目标是使得点云y通过训练后的数据集得到转换后的点云集y‘和真值一样。
训练时,假设输入和输出的数据关联对应关系是知道的(可以通过位姿等得到前后三维点的对应关系)每帧test时间大概达到0.15s。
最后作者发现该系统对目标个数很敏感,对深度噪音和数据关联的噪音不是那么敏感(加入训练时有错误的数据关联关系)
评价:本文没有解决数据关联问题,还需要借助于ICP等,输入限于雷达或RGBD数据。
转载地址:https://blog.csdn.net/Kevin_cc98/article/details/80008256 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
网站不错 人气很旺了 加油
[***.192.178.218]2024年04月23日 21时03分21秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
Linux下redis安装部署
2021-06-30
水平切分与垂直切分
2021-06-30
MySQL引擎
2021-06-30
MySQL下的NoSQL解决方案HandlerSocket
2021-06-30
Apache服务器下使用 ab 命令进行压力测试
2021-06-30
查看Firefox中的缓存
2021-06-30
http header头设置反向代理不缓存
2021-06-30
配置MySQL主从复制
2021-06-30
CI框架如何删除地址栏的 index.php
2021-06-30
expires与etag控制页面缓存的优先级
2021-06-30
取消掉Transfer-Encoding:chunked
2021-06-30
HTTP协议中的Tranfer-Encoding:chunked编码解析
2021-06-30
JavaScript面向对象编程
2021-06-30
在Javascript中使用面向对象的编程
2021-06-30
由浅入深剖析.htaccess
2021-06-30
PHP Webservice的发布与调用
2021-06-30
php反射类 ReflectionClass
2021-06-30
php扩展xdebug基本使用
2021-06-30
为 PHP 应用提速、提速、再提速
2021-06-30
Linux下gedit显示行号
2021-06-30
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 308079996 位访客
访问时间: 2024-04-26 16:00:57
访问IP: 18.188.152.162
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版