kinect摄像头在ubuntu16.04下的操作使用
 可以用里面的命令启动kinect摄像头 API文档:
可以用里面的命令启动kinect摄像头 API文档: 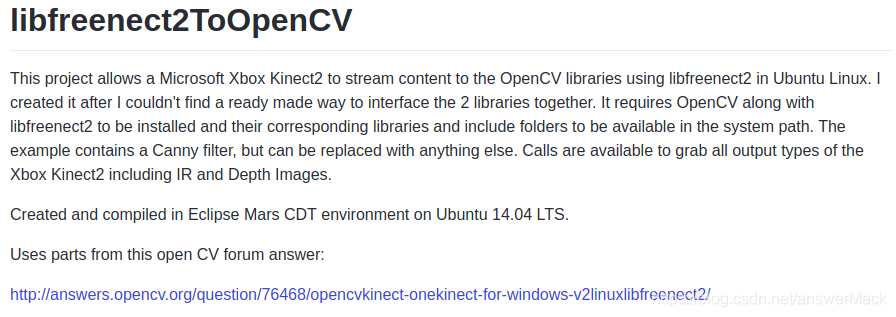 因为本人不会使用eclipse,所以程序未作测试。 后续iai_kinect包中有存照片的命令。
因为本人不会使用eclipse,所以程序未作测试。 后续iai_kinect包中有存照片的命令。 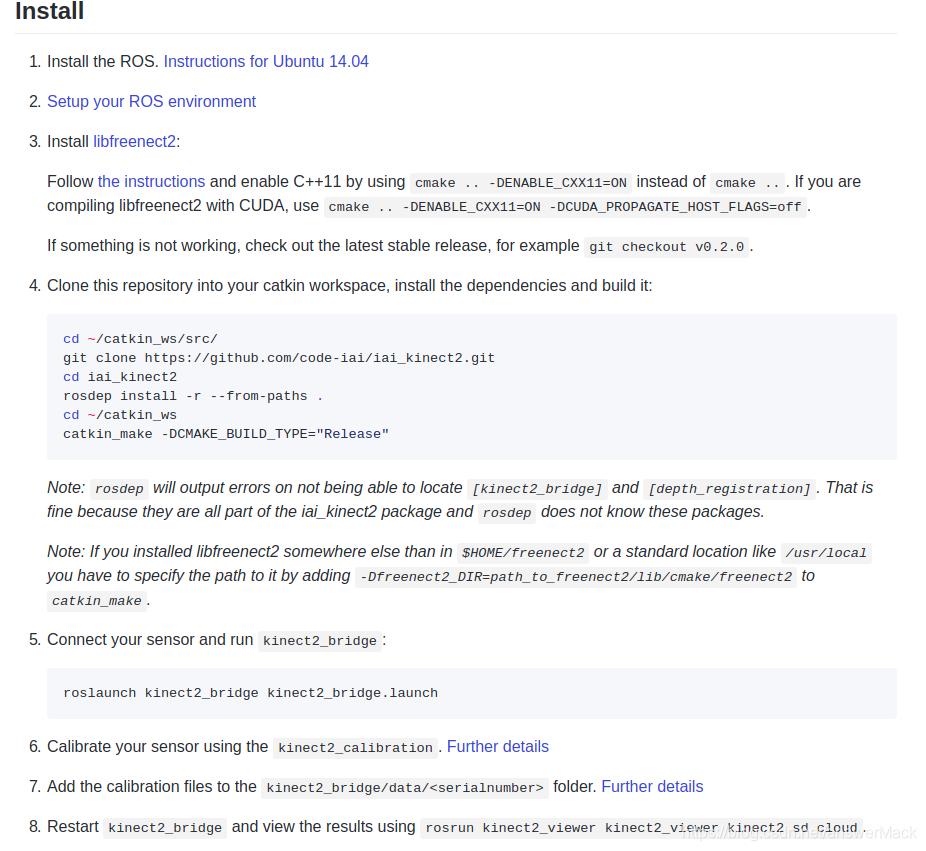 如果后续有安装问题,请细读readme文件。 本人GPU加速没开。
如果后续有安装问题,请细读readme文件。 本人GPU加速没开。 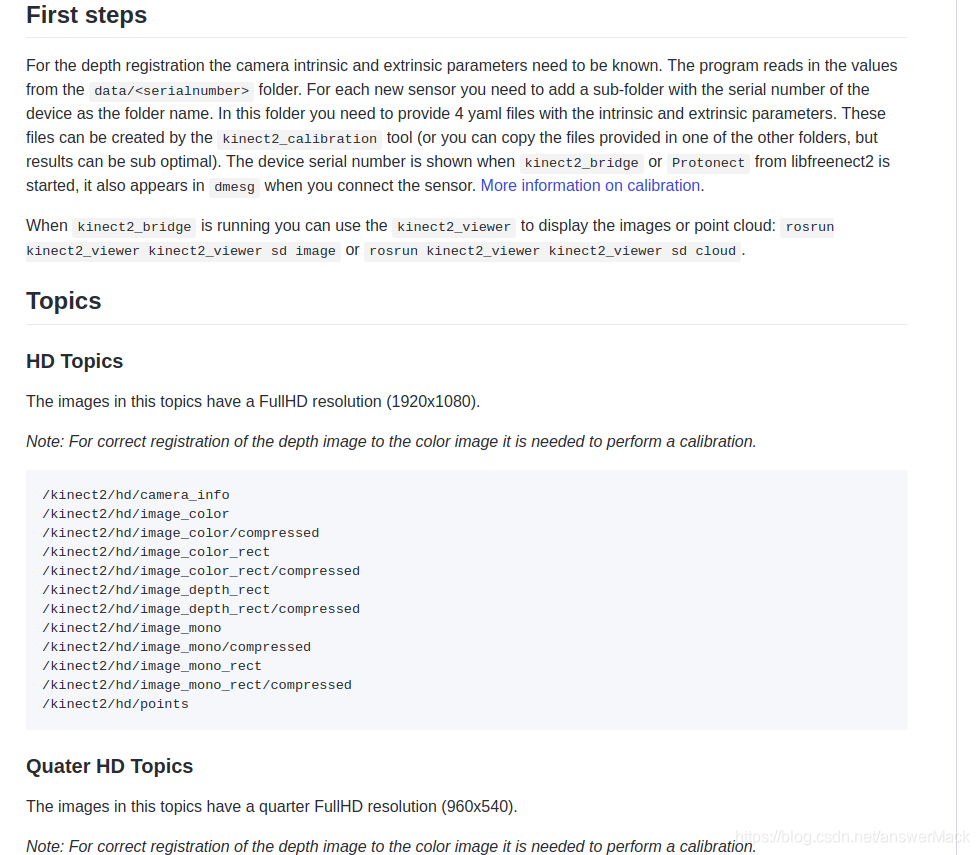
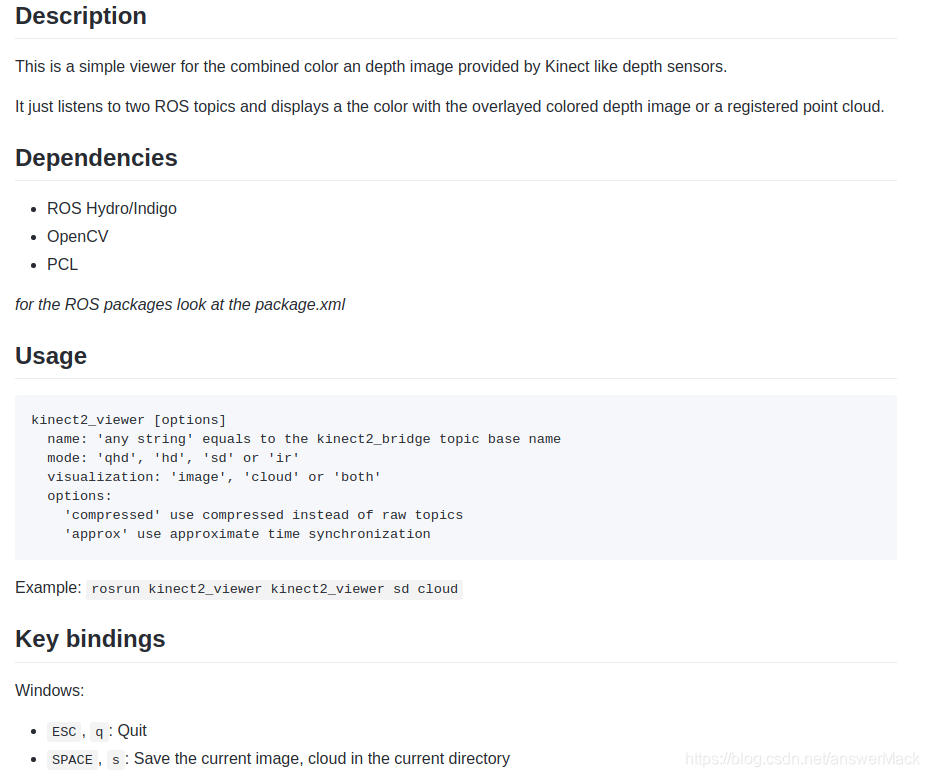 空格和S都是保存。ESC和Q都是退出。
空格和S都是保存。ESC和Q都是退出。 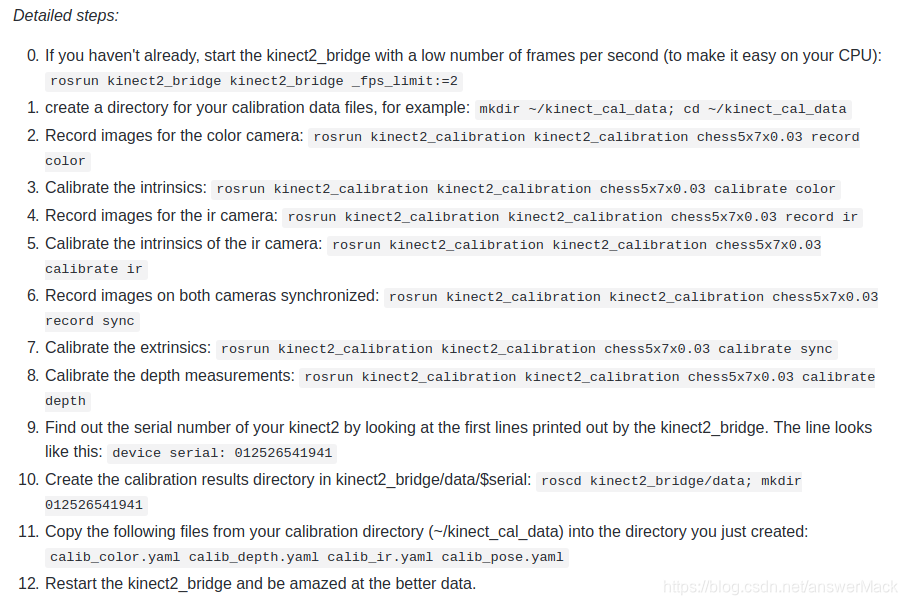 参考链接: 每一步需要空格保存图片的yaml文件。
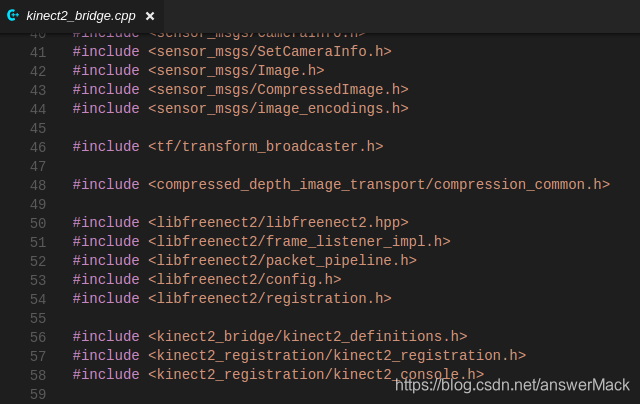
参考链接: 每一步需要空格保存图片的yaml文件。  引用同一个包的头文件: 在#include <kinect2_bridge/kinect2_definitions.h> #include <包名/头文件名.h>
引用同一个包的头文件: 在#include <kinect2_bridge/kinect2_definitions.h> #include <包名/头文件名.h>
发布日期:2022-01-20 01:07:49
浏览次数:3
分类:技术文章
本文共 866 字,大约阅读时间需要 2 分钟。
目录
kinect在ubuntu下的连接方法
参考链接1:
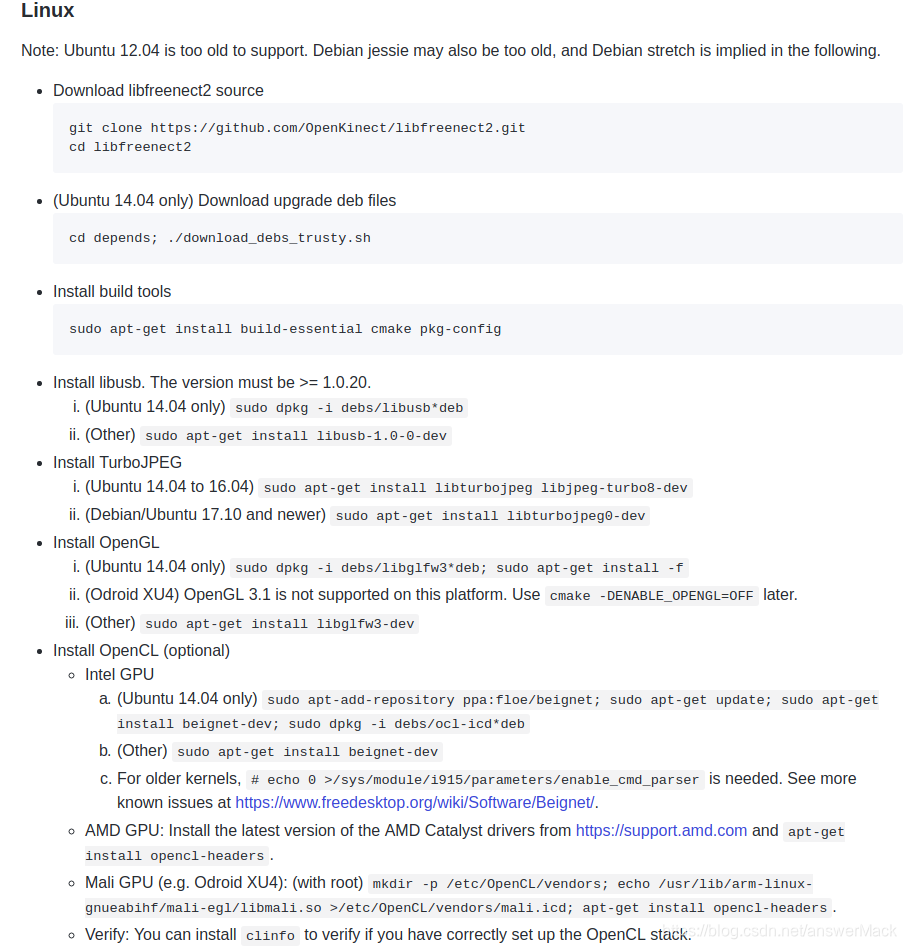
这个是ubuntu下的kinect驱动包。 里面的readme文件里面有步骤,比较详细。 可以用里面的命令启动kinect摄像头 API文档: 参考链接2:
中文,其中的图像读取教程是基于https://github.com/catch-twenty-two/libfreenect2ToOpenCV 因为本人不会使用eclipse,所以程序未作测试。 后续iai_kinect包中有存照片的命令。 kinect ROS连接
参考链接:
如果后续有安装问题,请细读readme文件。 本人GPU加速没开。 iai_kinect2/kinect2_bridge
操作步骤参考readme文件,已经很详细了:
iai_kinect2/kinect2_viewer
readme文件:
空格和S都是保存。ESC和Q都是退出。 iai_kinect2/kinect2_calibration
kinect内联参数标定:
readme文件: 参考链接: 每一步需要空格保存图片的yaml文件。 程序文件查看:
catkin_make Dfreenect2_DIR=/home/ma/freenect2/libfreenect2/lib/cmake/freenect2
在freenect2包里也有一句话:
引用同一个包的头文件: 在#include <kinect2_bridge/kinect2_definitions.h> #include <包名/头文件名.h> (待写)
kinect 外部参数标定
(待写)
转载地址:https://blog.csdn.net/answerMack/article/details/89327480 如侵犯您的版权,请留言回复原文章的地址,我们会给您删除此文章,给您带来不便请您谅解!
发表评论
最新留言
留言是一种美德,欢迎回访!
[***.207.175.100]2024年03月28日 12时52分28秒
关于作者

喝酒易醉,品茶养心,人生如梦,品茶悟道,何以解忧?唯有杜康!
-- 愿君每日到此一游!
推荐文章
设计模式——工厂模式
2019-04-27
Unity中实现有限状态机FSM
2019-04-27
Unity中实现反弹
2019-04-27
U3D游戏开发框架(九)——事件序列
2019-04-27
Unity中解决“SetDestination“ can only be called on an active agent that has been placed on a NavMesh
2019-04-27
Unity中的刚体
2019-04-27
Unity中的坐标转换
2019-04-27
Unity中为什么不能对transform.position.x直接赋值?
2019-04-27
Unity中物体移动方法详解
2019-04-27
使用对象池优化性能
2019-04-27
Unity中的UI方案(基础版)
2019-04-27
Lua(一)——Lua介绍
2019-04-27
Lua(二)——环境安装
2019-04-27
Unity中父子物体的坑
2019-04-27
基础知识——进位制
2019-04-27
Lua(十二)——表
2019-04-27
Lua(十三)——模块与包
2019-04-27
Lua(四)——变量
2019-04-27
Lua(十四)——元表
2019-04-27
Lua(十五)——协同程序
2019-04-27
白红宇的个人博客 - 记录点点滴滴的事 - 您是第 308013339 位访客
访问时间: 2024-04-26 08:47:40
访问IP: 3.137.178.133
Copyright © 2020 - 2023 blog.css8.cn 京ICP备2021015314号-1
手机版